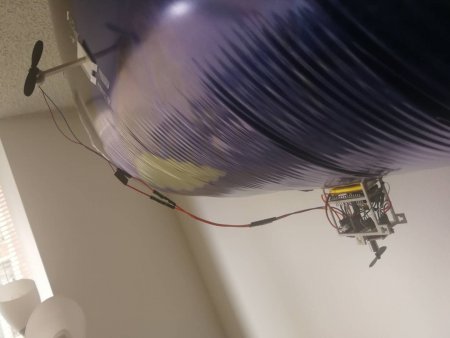
I've completed the first distributed prototype blimp at home. I adapted 2-1 motor configuration and it has 3 DOF:
The control video demonstration:
Some observations:
- The steering is really difficult to control because I only use one slider to control the speed of all motors. And it needs to practice to become the master of manual control.
- If we don't place the two motors that control steering symmetrical, the blimp can't travel in a perfect straight line. This will greatly effect our control ability.
- The motor on vertical direction needs to have some degrees of autonomy to maintain its position. Otherwise, you have to be perfectly neutral buoyancy.
- The overall weight is still very big, right now it's 79g in total. We need to reduce that and keep the total weight under 75g even we are using 4 motors.
Some improvements:
- In 2-1 motors configuration, we need to separate the speed control: one slider to control the horizontal speed, one slider to control the vertical speed.
- We need to mark the location of the motor on balloon to make it symmetrical.
- To add autonomy ability, we need barometer to do auto-vertical control.
- In the next prototype, I'll use smaller motors (2g/each) and test its performance.