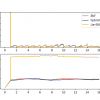
To complete the CoRL submission, I put all the simulation code here. The simulation code compares 4 algorithms, including EKF, LG-EKF, hybrid representation, and fully circular representation.
For the past week, I mainly worked on the paper revision for the manuscript entitled "Fabrication-aware Design for Furniture with Planar Pieces". This paper was submitted to Robotica and required a major revision. It is very close to finish the revision. I wil add more modifications after receiving...
In this blog post, I explain graph-search based motion planning algorithms, which overlay a grid on configuration space and assume that each configuration is corresponding to a grid node. Then, the robot is allowed to traverse to adjacent grid points as long as the edge between the nodes is collisio...
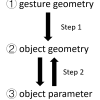
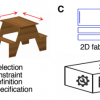
Background Whole question to solve: How to use 3D gesture to change 3D design parameter Break down to two smaller questions: How to map 3D gesture to 3D object geometry How to determine 3D design parameter from object geometry Challenge Ambiguity in gesture Different designs have diff...
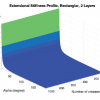
Update: I found a typo in the modeling I presented last week. I has been revised. The new model makes sense by looking at the trends. The model is validated at some extreme situations (e.g. then crease folding angle alpha=180deg). Out-of-plane bending is added to the analysis. So now we ha...

Markdown beginner's guide I'm exploring this Markdown recently and I found it really simple and elegent. So I would really like to share some of what I learnt with everyone. I'll keep it up to date in the future. You can also download Markdown beginner's guide.md file from my git Content W...

Foray Blimp Becoming Mobile Big Picture In order to build the optimal blimp for competition, we are currently focusing on modeling the different parts of the blimp’s movement. Specifically, movement in the horizontal plane and altitude control. In terms of horizontal plane movement, we are seekin...
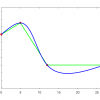
A cubic spline is a spline constructed of piecewise third-order polynomials which pass through a set of n control points. According to [1], a cubic spline \(S(x)\) can be defined as: \(S(x)\) is a cubic polynomial \(S_j(x)\) on [\(x_j,x_{j+1}\)], for all \(j = 0,1,...,n-1\). \(S_j(x) = a...
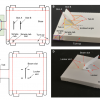
For the last week, I worked on paper revision and response letter for the Robotica paper about the integrated design and fabrication strategy for electromechanical systems for robotic systems. Inspired by the reviewer's comments, we created a new connection method to construct inclined out-of-plane...
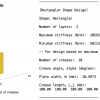
Using the analytical model developed last week, with certain geometry constraints, stiffness of the proposed orthogonally assembled double-layer corrugated structures have been evaluated. Using design parameters optimized from maximum stiffness requirements, a rectangular shape sample and a circular...