Background
- Whole question to solve: How to use 3D gesture to change 3D design parameter
- Break down to two smaller questions:
- How to map 3D gesture to 3D object geometry
- How to determine 3D design parameter from object geometry
Challenge
- Ambiguity in gesture
- Different designs have different parameters
- Different user have different understanding of gesture
Related works
(How do other works manipulate 3D object geometry)
- FabByExample (2014)
- 2D interface (keyboard-mouse)
- select leaf node in hierarchical tree structure and drag to change
- => not applicable to our system (no leaf node, not 2D interface)
- Voodoo Dolls (1999), MixFab (2014), etc
- Explicitly define which gesture to change what parameter
- => unextendible (different parameter for different object)
- Posing and acting as input for personalizing furniture (2016)
- voice command, combined with hand posture with regard to body scale
- => not consider voice command for now (complicated to implement, voice recognition and ambiguity in voice commands can lead to more challenges)
- Machine learning
- => not consider for now (complicated to implement, need to check if there is existing dataset)
Method
2-step pipeline:
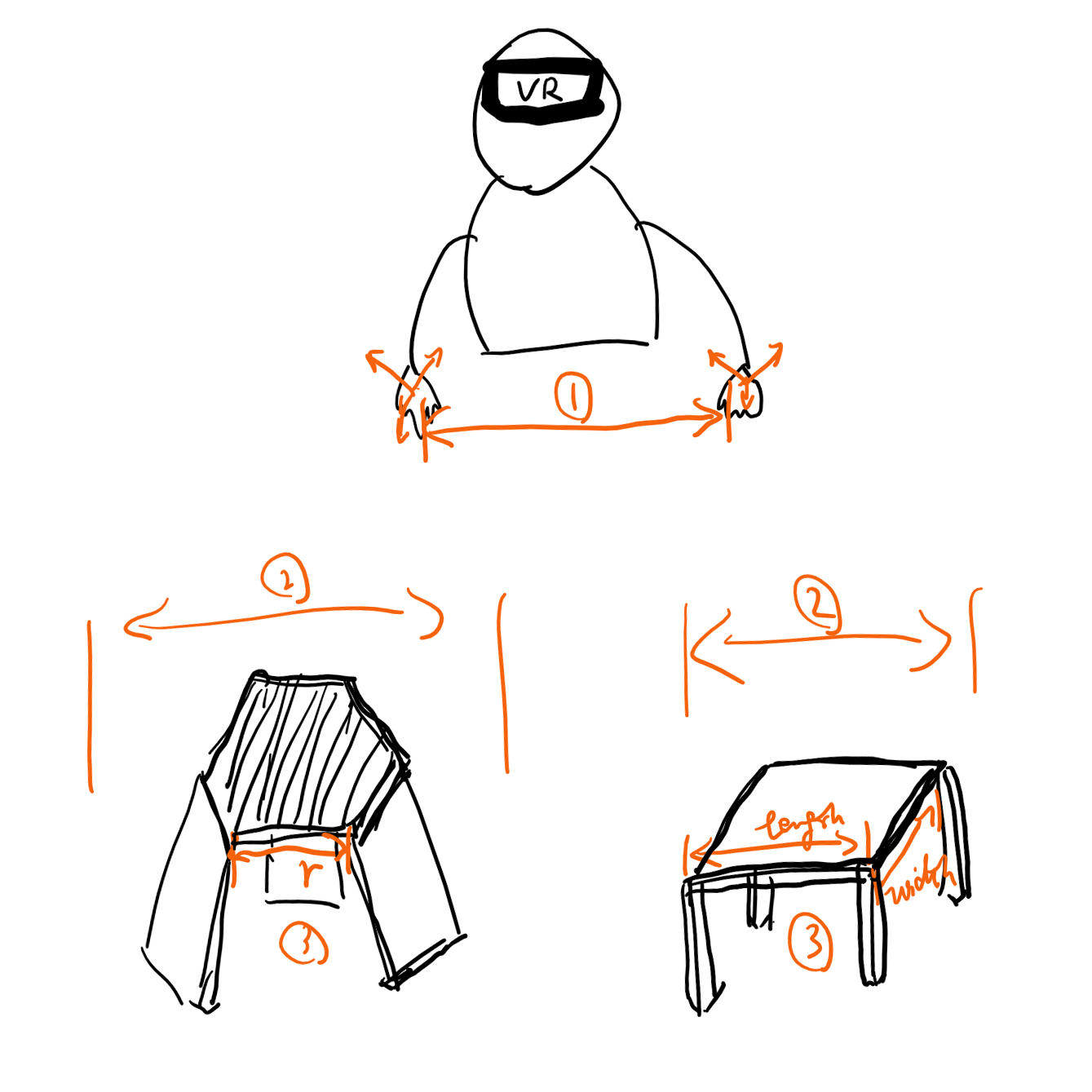
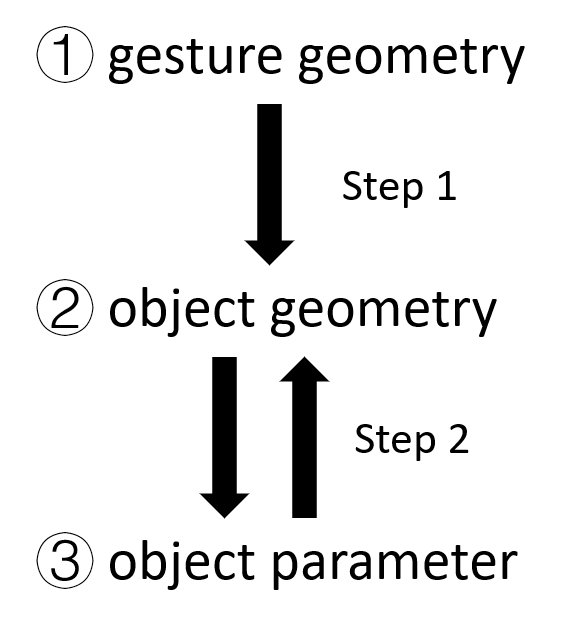
-
The reason why it is helpful to use object geometry as a middle point between gesture geometry and object parameter:
- the abstract geometry of any object can be classified into: plane, line, point
- so the object geometry classification remains the same and limited, while object parameter is different among objects
- when the information from gesture and object are both geometry (in terms of plane, line, point), there are some similaries that could help the mapping of step 1.
- this similary is:
- for plane: 3D position, normal direction
- for line: 3D position, direction
- for point: 3D position
-
The reason why it is challenging to map gesture geometry to object geometry:
- the object doesn't know which geometry is selected to change, especially when the geometry of object is complicated (irregular shape, concave shape, internal faces, etc)
- the object doesn't know what kind of change and how much change the user wants for the object (through the gesture)
-
The reason why it is challenging to map object geometry to object parameter:
- object geometry is very flexible, while object parameter is a limited set of parameters that would ensure fabricability
- some object geometry may not has corresponding object parameter, so how to update object parameter to achieve what the user want as closely as possible
- how to define this "closeness"
- how fast the mapping or search is when updating parameter to model intended geometry change
Contribution
- (overall: ) bridge the gap between 3D gesture and object parameter (with constraints of the gesture is not explicitly pre-defined and is as intuitive as possible, the modification method of object is extendable)
- (in step 1: ) propose an approach to map gesture geometry to object geomtry (in a relatively intuitive way)
- (in step 2: ) propose an approach to map object geometry to object parameter (in a relatively effective way)
Key idea in the method
Objective: adapt DoF
- Hand DoF:
- palm: position + rotation (6 DoF)
- 5 fingers (simplified): point in/out (5 DoF)
- single hand DoF in use: 11 DoF
- two hands total DoF in use: 22 DoF
- 3D gesture geometry DoF:
- palm plane: position + normal direction (6 DoF)
- line: position + direction (6 DoF)
- point: position (3 DoF)
- single gesture geometry DoF in use: 15 DoF
- two hand gesture geometry DoF in use: 30 DoF
- 3D object geometry DoF:
- for each mesh: plane (6 DoF) + line (6 DoF) + point (3 DoF)
- total DoF: 15 \(\times\) mesh number
- object parameter DoF:
- limited, different for each object => generally 10-ish DoF for each object
- detailed parameter list example as follows:
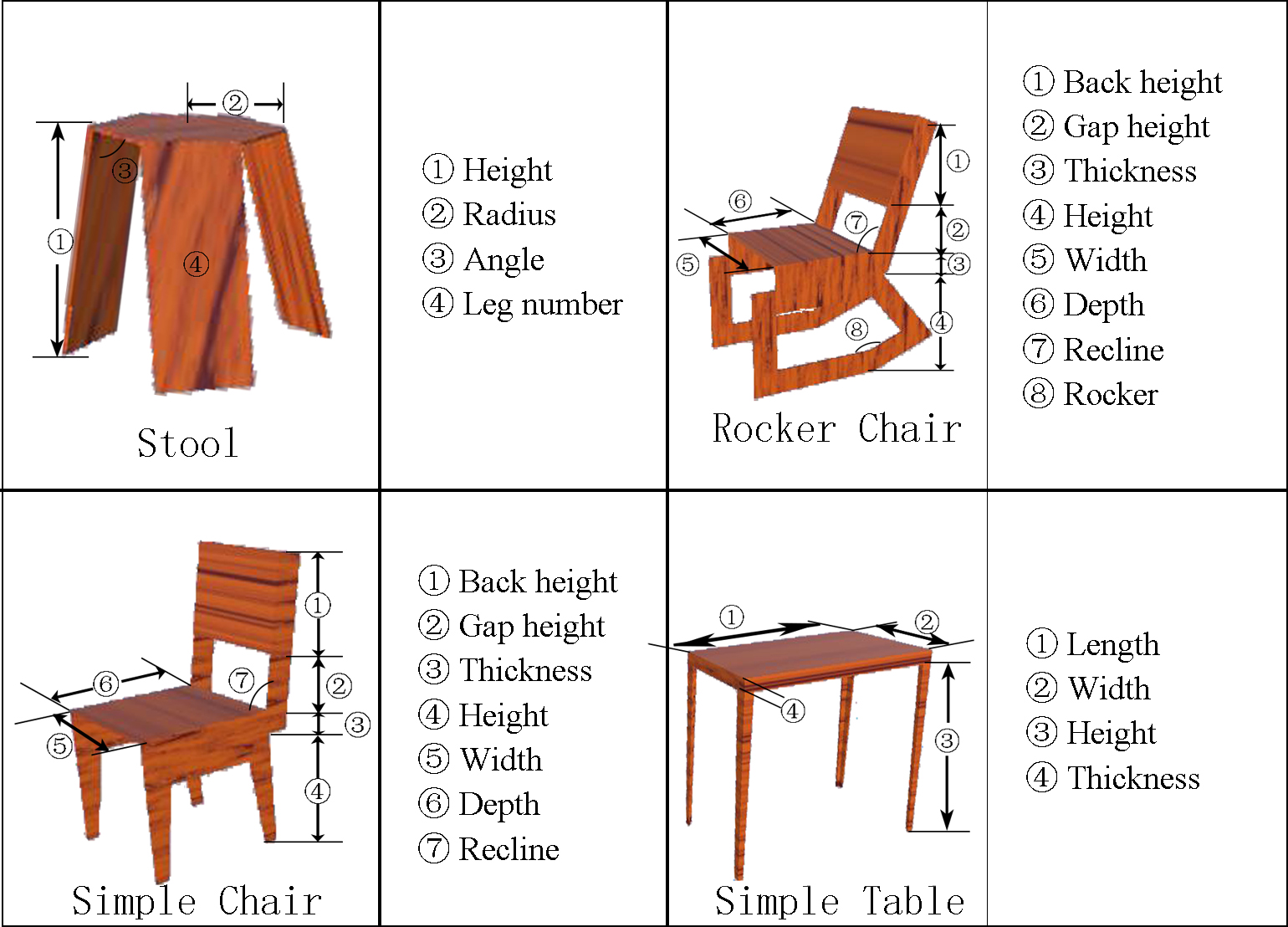
so the challenge is to adapt: hand (22 DoF) -> gesture geometry (30 DoF) -> object geometry (15 \(\times\) mesh number DoF) -> object parameter (10-ish DoF)