While technology has for the most part completely integrated itself into our daily lives, robots have not for many reasons. Robots are complicated, expensive, and require great expertise to design, but if all of those could be eliminated, there could be an increase in robots seen in everyday life. B...
For the past six weeks I've been working on the Random Dataset Generation for CoLo, our multirobot localization simulation for localization algorithm development. The dataset generated is built to resemble in form the UTIAS Multi-Robot Cooperative Localization and Mapping Datasets, which CoLo uses...
The dynamics for single motor flyer in 3D space is very similar to the one for four-motor drone system. The main difference is that for the single motor system, only one propeller is rotating. Basing on the simulation for four motor drone, a new matlab simulation was created to describe the behavior...
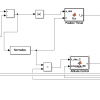
The control loop has been implemented in Simulink. The physics and attitude controller are yet to be finished.The total required thrust comes from two sources: the thrust from the position controller and the thrust required for the attitude controller. The following image shows the control loop in S...
The Robot Compiler (RoCo) is a robotics codesign and fabrication environment to help the general public create their own robots. The above image shows two parameterized geometries representing robotic grippers (left) and a section of the code used to generate the geometries (right). Although these...
The problem of the single-motor-flyer can be summarized and assumptions added.

These two graphs are based on my Matlab simulations of the behavior of a pre-compressed bistable beam under a point force. The segmented one is the actual data due to some errors, but the adjusted version of the graph (ideally elinimating some errors in calculation) matches the results in previous r...
CoLo is a portable simulation environment for cooperative localization that allows users to create and test estimation algorithms to compare how accurate the estimated robot locations are, compared with the locations supplied by the UTIAS real world data set. In the past week, I finished up one...
Previously, the electrical and code interface was implemented in Blocky. On the implementation side, the whole process was such that users will drag together blocks in the Blockly interface but no API are called. In the end, the output is a builderFile that can be run to create the RoCo component th...

The Robot Compiler (RoCo) is a robotics codesign and fabrication environment to help the general public create their own robots. The above image shows an assortment of programmatically-generated and parameterized polygons connected to each other (left), the script used to generate the polygons (uppe...