Simultaneous Localization and Mapping (SLAM) is studied in the past decades, resulting in formulations that allow robots to estimate their pose and model their environments. In the SLAM framework, a robot does not care about planning, so that a man gives the robot the trajectory to follow during the...

By the end of this week, we are expecting the electrical design software for roco to be completely done. This blog is trying to explain the structure and a summary of the software. One can find source code of software here High level of whole project package Pipeline of drawing changes Pack...
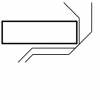
Because of the requirements of the autorouter we were using, our board outline needed to consist of '4 node paths' however the generated file we were given, consisted of simple lines. After searching for a while, we realized there was no existing way to do this automatically through a script and hen...
After struggling with the code from the Paper Bot cloned folder, we were able to successfully upload the code onto the ESP8266. Thanks to the generous help of Daniel Ferguson, there the code uploaded without any errors. Below I will include links and instructions for the Paper Bot usage with a Mac d...
User can generate drawings with the desired electrical design. Successfully parse the wiring information from ses file to array A little "hacky" way, not using any parsing package but going through string and looking for path section For ses file only A single script was created th...

We added tabs to the RoCo design so that the tape in previous boats will be replaced by mechanical connections. We also experimented with the settings on the Silhouette paper cutter and cut out half of one paddlewheel. In the next week we will construct a boat using the Silhouette Cameo to cut out...

I finished the boat assembly on RoCo, including the servo holders and all tabs, and have started trying to cut out a prototype using the paper cutter so we can see if the tabs are strong enough to hold the boat together and if the dimensions of the servo holders are correct. We had some problems fin...
These past couple of weeks I have been soldifying my understanding of what our goals for the Robotic Paper Boat project are. The overall goal for me is to create a GUI suitable for 5 year olds to design paper boats. But the main obstacle that can make or break this GUI is the widget that is implemen...
I am finally able to stream the position and orientation data from the OptiTrack Motive Tracker software into a python program on the ComputeSticks! Below is a video visualizing the demo given yesterday. Week6.mp4
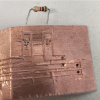
After coming to the conclusion that copper tape was more conductive than aluminum film, we discovered that using the copper tape on thin plastic yielded better results than the copper tape on paper because the plastic is more durable than paper. We continued experimenting and through trial and error...