
To conclude SURP 2021, we are tasked to do a presentation and poster regarding what we have done for the past 9 weeks of SURP. To see my presentation and poster, go to this google drive. To see the Origami Feedback Controlled Cars repository, go here. In this repo, you will see the guides...

For SURP 2021’s Week 9, I worked on the pivoting car. It is a car that has a hinge in the middle. On its hinge is a SG90 servo that rotates the half of the car to a certain direction. Below is a photo of the pivoting car. During this week, Jaehoon Song (LEMUR Arnhold) also managed to generate/di...

See my research poster and presentation titled "Printable Robotic Boat Swarms with Actuation and Sensing Capabilities" for an overview of my contributions from Summer 2021.
The experiment I run in our lab this week is basically the altitude control test. The setup is as follows: Part of the data that I got from our system: The altitude info: The rotation in the altitude changes is also captured: Next I'll imporve the code to process the information(ro...
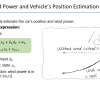
Previously, a P controller was used for simplicity as it removes the requirement of keeping track of time at each time step. However, with the unstable motion of the blimp, a PID controller is needed to further stabilize the system. This is the result: The parameters were tuned based on the trac...
When we use POST method to create data to send it to the server, we do not need to list the models using known_models.py. Previously, we needed to put the name of the component in known_models python script like this: Then, we need to run the thumbnails python script to create the thumbnails...
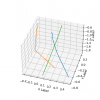
In the past 2 weeks, I tried to develop and algorithm that can be used if we have a blimp that have a camera facing down. With the camera, we would be able to detect the field of interest and control the robots within the field. In this case, the current algorithm can be used to control any vehicle...
One thing that I wanted to do this week was to validate the effect of including frequency diversity in the network that we made for our robots. So, I programmed one ESP32 feather board with a 433 MHz packet radio on its stack to send out a lot of garbage values over the 433 MHz band extremely quickl...

During SURP 2021’s week 8, Shahrul Kamil bin Hassan (Team Arnhold), Bhavik Joshi (Team Arnhold), Marisa Duran (Team Arnhold), and I integrated the three epics in the Arnhold project which are Mesh Networking, Vision Processing, and Feedback Controlled Cars. The integration can be seen below. A...