Combining mesh networking, vision processing, and origami cars
Jillian Naldrien Pantig origami robots rocolib tank RoCo cars mesh networking vision processing visual openmv arnhold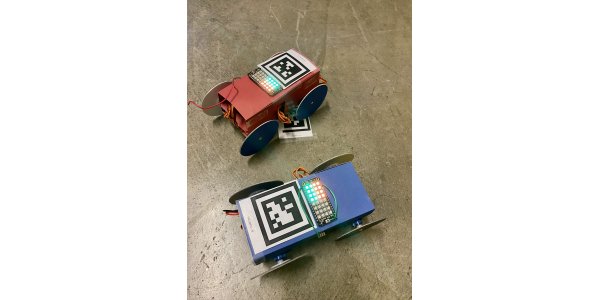
During SURP 2021’s week 8, Shahrul Kamil bin Hassan (Team Arnhold), Bhavik Joshi (Team Arnhold), Marisa Duran (Team Arnhold), and I integrated the three epics in the Arnhold project which are Mesh Networking, Vision Processing, and Feedback Controlled Cars. The integration can be seen below.
April tags are used in order to facilitate feedback control from the OpenMV camera to the origami car (made using RoCo). One april tag is placed on the car while the other on the ground. The latter april tag is used as a target for the car with an april tag to go to. Kamil formulated an algorithm to make this happen in which the OpenMV detects the location of the april tag of the car with reference to the target april tag on the ground. The instructions are then sent to the car using mesh networking and are processed by the car in order to move to the target.