The Robot Operating System(ROS) is a set of software libraries and tools for building robotic applications. The ROS platform is a unified and well-documented framework for development with different kinds of robots. In the case of our project, ROS is chosen for modification of Crazyflie 2.0's contro...
Last week, I assembled the first prototype of the load cell system. It was able to read the force applied to the sensor and send the data to Arduino serial terminal. However, it's still a bit inconvenient to process the data like plotting or doing mathematic operations in the serial terminal. With P...
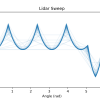
The research question that this investigation seeks to answer is whether its possible to localize a drone in two dimensional space using a one dimensional LIDAR or range finder. The investigation has two main aspects; hardware development and integration, and software and simulation. The progress in...
This past Friday, Christian Prathyush and I met with some of the newer members of our lab who are interested in working on RoCo. Before we completely move to a new project, we got together to discuss what RoCo's status would be by then. One of the topics discussed was the fairly fragmented nature of...
The 60GHz Tx RF pulse generator is the circuitry in the red box. The function of this block is to generate a 60GHz mm-wave pulse from the multi-phase 10GHz LO signals and deliver this RF power to the integrated 50Ohm antenna load. There are 3 main circuit blocks : a NAND gate logic frequency sy...
The interpretation of covariance intersection is based on its assumption of Gaussian distribution. Or we have to draw the covariance ellipse to illustrate the variation of such fusion. However, what happen to the fusion of other distribution? In this paper, they formulate the combination of prob...
Automatically added tabs for a cube structure This week, I worked on improving how the RoCo system handles connections. RoCo is designed to allow users to easily fabricate 3D robot designs in a number of ways. Often, this involves breaking up or flattening the geometry, which causes the need for a...
Before summer started I left Andruino as a work in progress. I was able to achieve active communication between my phone and the microcontroller but the system was very distinct from RoCo and not easy to use at all. This quarter my focus will be on improving the Android app and making it more integr...

On Tuesday I finished the assembly of the load cell based automatic force measuring system: After testing, the prototype can automaticlly measure small scale force up to 100g with precision up to 0.01g (I am still working on improving the resolution of the system). Here are two images for measur...

In order for users to add the algorithm to the envirornment, users need to modified two aspect of the environment: Create a algorithmn class for this new algorithm Add this algorithmn to the list of algorithmns in the main environment file for testing.