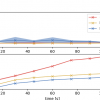
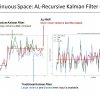
We simulation these SLAM algorithms with increasing duration. We can see that the estimation accuracy is comparable among 3 SLAM algorithms, but the processing times are different. The processing time is basically dominated by the optimization problem. The bigger the optimization problem, the long...
This week, I fixed some bugs in my previous code and wrote a new program to visualizethe live streaming data I also conduct more experiments to verify my real_time streaming code: Meanwhile, I've been working on the Opti-track system and try to get it to work for multiple rigid bodies. The...

This week, I used Raspberry Pi camera to collect the image data of multiple green balls as shown below. All the code and data are in the github

This week, I used BLYNK app to manually control the feather board with 4 motors. The code has been uploaded to the git The situation is shown in the video: Next step: Remote control servo board Remote control motor board and servo board at the same time Use game controller and webSock...

The dashboard needs to be highly customizable and versatile. This means that each step in the process of getting data from robot to web app should be a separate component that can be swapped out. I have identified the distinct components needed for this web app in this diagram. The robot sends s...
First, the camera detected all the blobs of within the camera frame. The color along with its horizontal and vertical position are encoded into a 7-character string, which is then sent to the feather board using the i2c protocol. the feather board iterates through list of string. If the color code m...

This week, I used the painlessMesh library to create a very simple mesh network of three nodes. I wrote the code to resemble how I believe our blimps/ RoCo robots should use the network once they are automated: they send instructions to one another that is interpreted in a switch statement, these in...

For SURP 21’s week 3, I created two vehicle designs using rocolib -- a tank and a simple 4-wheeled car. The builders for these can be seen on the GitLab repository below: https://git.uclalemur.com/jllpntg/rocolib.git The builder for the tank is named TankBuilder.py while the builder for the 4-wh...

This past week, I worked on camera recognition using the openMV camera. This included recognition of different colored blobs, as well as recognition of April tags. To test the camera's April tag recognition, I put April tags on the wall and tested the distance that the April tags could be detecte...