
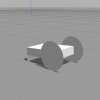
Pictured: A simulation of the learning algorithm in a CartPole-v0 environment provided by OpenAI gym. This last week I started playing around with Tensorflow for reinforcement learning. I was able to implement a policy gradient with parameter-based exploration(PGPE) algorithm for learning a policy...
In the past few weeks I have been working on taking over some of Pooja's work as she is not present this quarter. I have read a few papers on SCP actuators, how they work and how they can be produced. I experimented myself by making a few actuators in the lab using the setup created by the other lab...
I found this link on the Bitcraze website: https://www.bitcraze.io/2016/05/position-control-moved-into-the-firmware/#comments It explains the basic layout of Crazyflie architecture. Using Kinect, ZMQ sends the location to the Python client.
While I am working on the literature review on distributed estimation algorithm, I think it is insightful to list several algorithms alongside, to see their development. Consensus KF The algorithm is the first one along this investigation. Basically, the algorithm requires nodes to run consens...

For last week, I made a lot of modification to our mechanical logic design and ran tests. Some issues were solved, such as short-circuit and contact problem. Now, the mechanical logic can snap at the first time, but always stop at the middle point in the way it should snap back. The bistable beam wa...
After struggling with the mathematical formulation of the problem for what has been a long time now, it is finally in a state where it can be converted into code. The importance of not overlooking the accuracy of the math cannot be understated since this uniquely defines the code. Whilst performing...
A Seg Bot in Gazebo This week, I worked on creating a Seg Bot model in Gazebo, the robot simulation engine that we are planning on using for our project. The Seg Bot model was created in the SDF format, an XML file format used by Gazebo to specify physical structures such as robots. The SDF format...
A Builderfile is a sequence of instructions in RoCo that when executed gives a desired output. However, the use of builderfiles can be expanded to support operations, such as copying subcomponents and redoing certain operations in the UI. Data Structure: Since RoCo components are hierarchical b...
We are one more step close to the succeed for our printable autonomous robot. The snap threshold was decreased by modifying the design parameters, such as width of bistable beam. Now it seems it's the right time to build up equation for our mechanical logic to describe its behaviors and furthure hel...
For mathematical simplicity, most dynamical models of traffic systems are examined on ring roads where the last vehicle in a platoon affects the first vehicle as if it was in front of it. Moreover, control systems for autonomous vehicles, such as those proposed by Daniel Work et al., have been exclu...