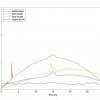
This is a SLAM performance analysis. I compared our OEM-SLAM with other three state-of-art SLAM algorithms, including EKF-SLAM, fast-SLAM and graph-SLAM. The first figure is localization error and the second figure is mapping error.
Recently I've been reading some interesting papers on SLAM algorithm specifically using cameras. Some of these really broadened my mind. Some of interesting algorithm incluedes the most fundamental one, mono SLAM [1], and the recent one, ORB-SLAM [2]. I'm now studying these frameworks in my spare ti...
Cut-off strategy means to use only first N observations to do polyak averaging, and stop updating landmark after N observation. The cut-off strategy has two advantages: More robust than traditional polyak averaging in both global observation model and intermittent observation model Able to...
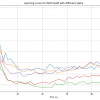
This week I've been revisiting the online EM for Hidden Markov Model [1]. The formulation between HMM and latent model is similar but there's a little different. I've also developed an performance evaluator to quantify and optimize the performance of our framework, especially the choice of learnin...
Over the past week, I've successfully transforming the range-bearing measurements to direct observation with correct statistics (without approximation) Now the algorithm is fully functional. Here is the demo setting: maximum range radius: 25 cm range uncertainty: 0.5 cm^2 bearing uncertainty...
Improved algorithm with direct observation: Debugging on why range-bearing measurements failed: Attempted algorithm with range-bearing (perfect rnb observation, noisy time update): Attempted algorithm with range-bearing (noisy rnb observation, perfect time update): Still, problem...

For previous two weeks I was building up the framework of EM-SLAM. The framework is showed as following: And as well as the demo by using direct observation (states can be directly observed with gaussian noise): This demo works properly as expected (although there are some discrepency betwee...
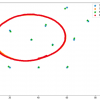
Attached is a simple demo on one-step update of EM-SLAM algorithm. Note that the robot has only one observation at the begining, and then with an EM algorithm, the landmarks will converge to a certain configuration, but not exact position due to the prior guess of robot state has error. With a corre...
This week I was trying to derive the mathematical formulation of one-step update for recursive EM-SLAM algorith. I was referring to both batch EM-SLAM paper as well as recursive EM paper for reference, and I figured out a coarse representation of Q-function. While I am still doubt on how to get rid...