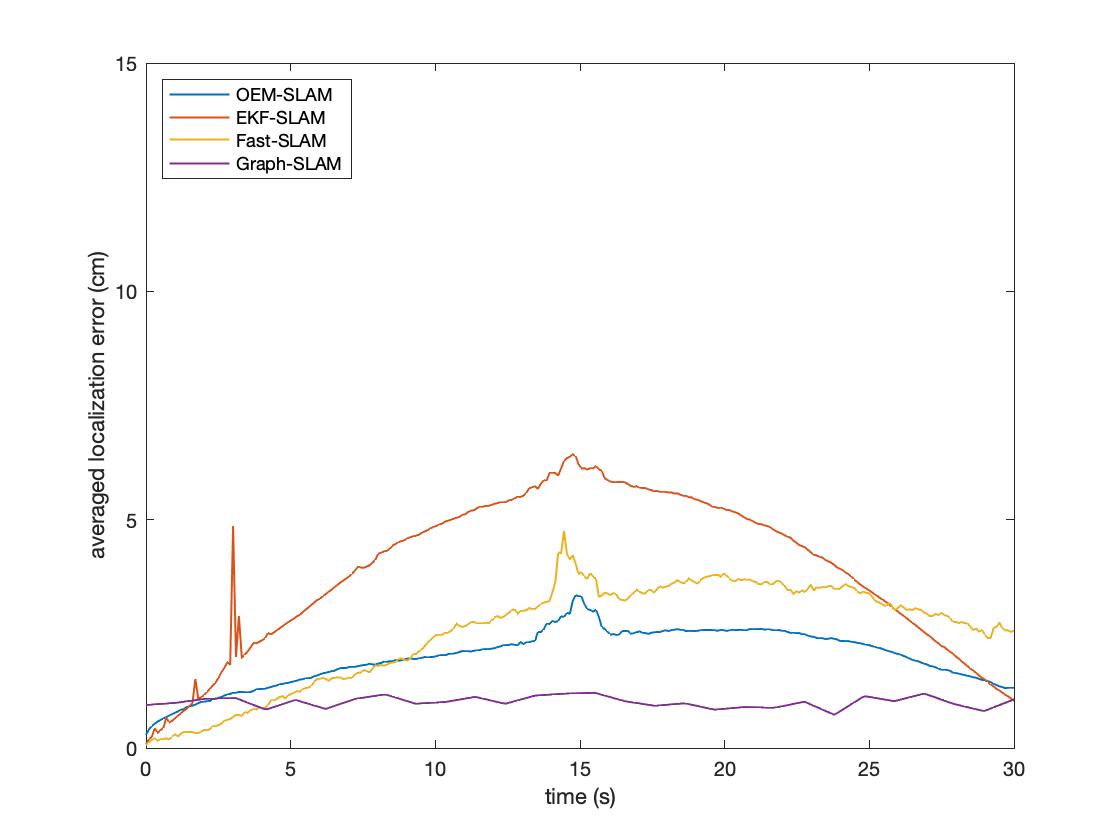
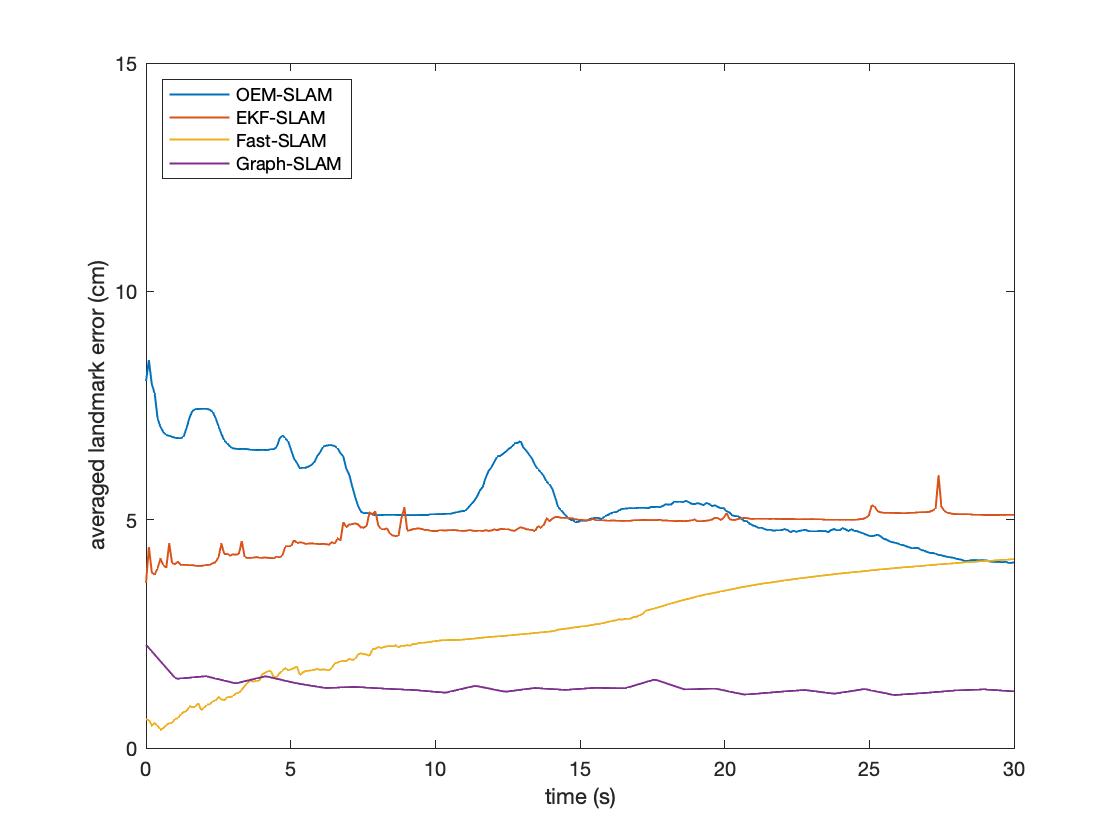
This is a SLAM performance analysis. I compared our OEM-SLAM with other three state-of-art SLAM algorithms, including EKF-SLAM, fast-SLAM and graph-SLAM. The first figure is localization error and the second figure is mapping error.
This is a SLAM performance analysis. I compared our OEM-SLAM with other three state-of-art SLAM algorithms, including EKF-SLAM, fast-SLAM and graph-SLAM. The first figure is localization error and the second figure is mapping error.