What are we working on?
Computational design of origami structure, based on mechanical specifications.
Why are we doing this work?
Advantages of origami structures:
(1) tunable mechanical properties;
(2) ease of design;
(3) inexpensive and rapid manufacturing;
(4) light weight with high strength-to-weight ratio.
What's the goal for this specific project?
Building lightweight corrugation structures that satisfy stiffness requirement while optimize the weight (as low as possible).
What have been accomplished so far and what will be accomplished?
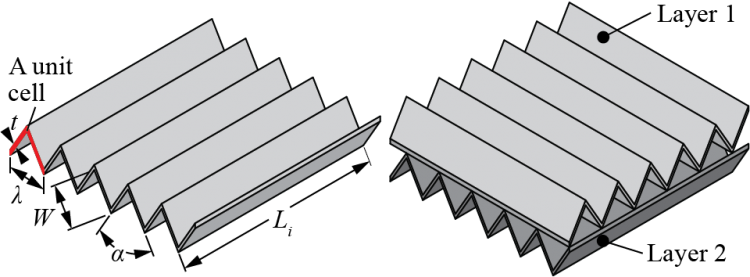
(1) We have developed easy-to-use analytical models to predict the stiffness of double layer corrugation mechanism.
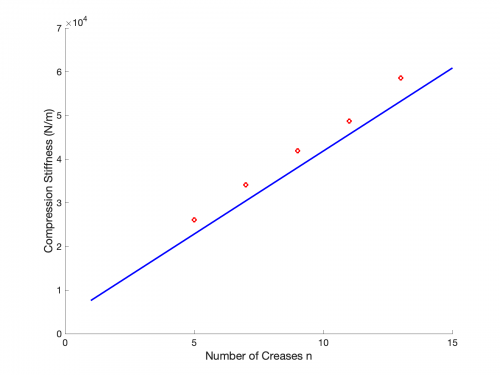
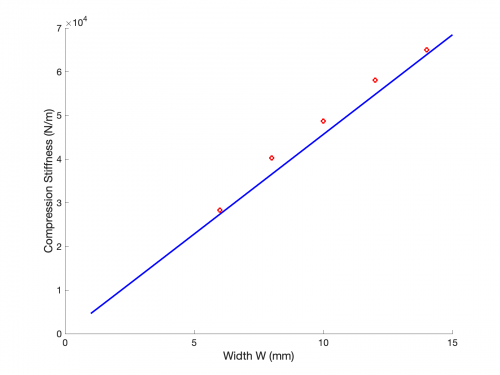
(2) I am working on model validation to make sure our models are correct.
(3) We will use the analytical models as a design constrain, along with geometry contrains and other constrains, to design origami robot based on minimum weight mertic.
Weekly update: Mechanical testings
* Reminder
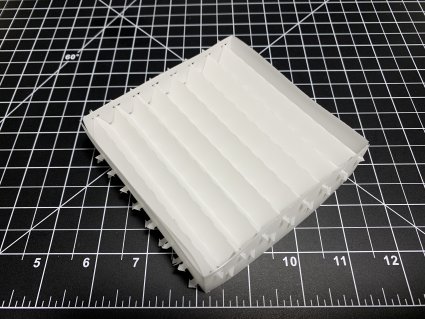
Model validation --> compression stiffness --> sample of 1 for now (will do sample of 3 for each case)
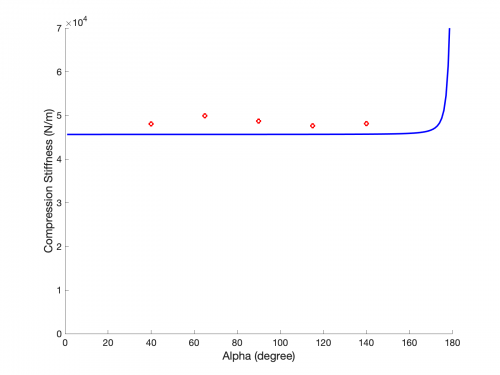
- Note: I planed to do one experiment to test the case when alpha = 180 deg, which gives us a flat square. Based on the buckling analysis I researched on a month ago, the approximate buckling load for the square is around 2.5N, which matches the behavior I noticed during the compression experiment. However, the experiment setup / machine can not capture the the stiffness for that small load and moving range. So, no cases at alpha = 180 deg are included in the result.