10
Jul
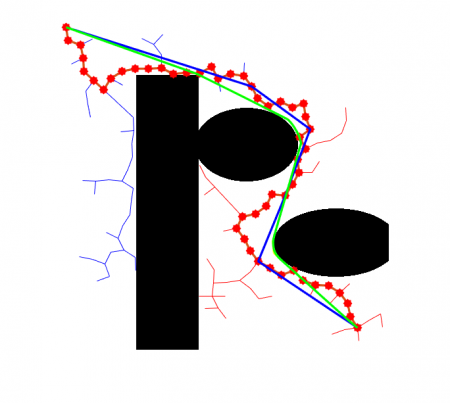
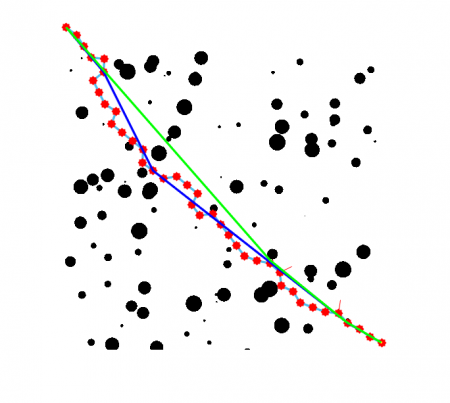
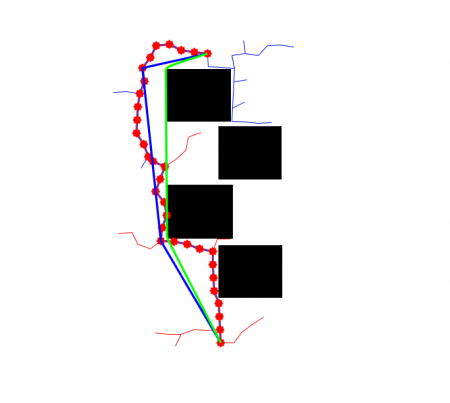
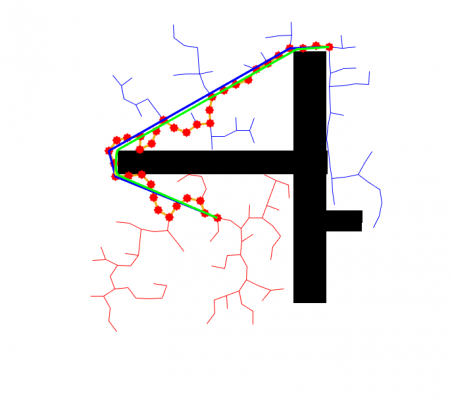
Bi-directional Target-Oriented RRT Based Path Planning Algorithm
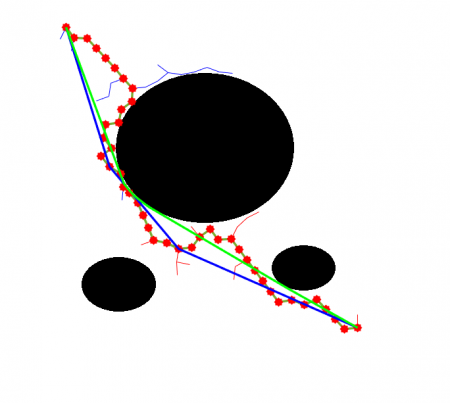
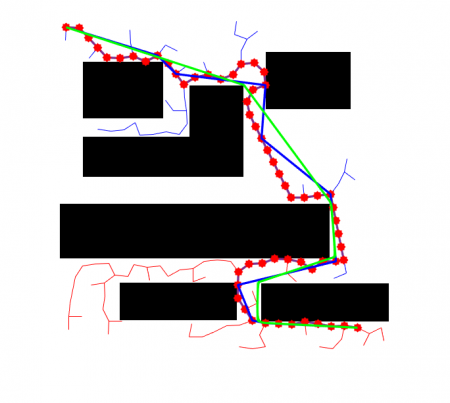
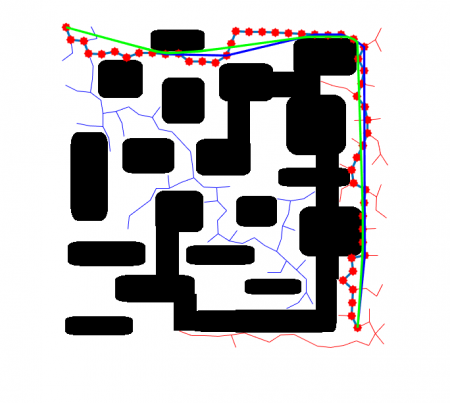
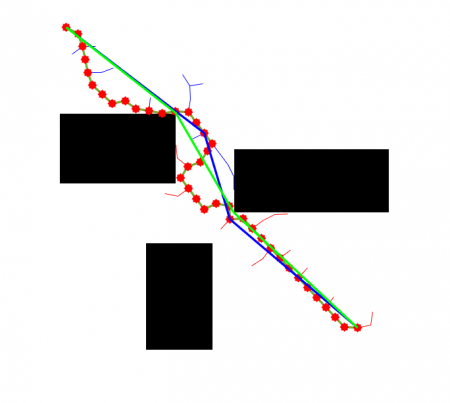
Zhaoliang Zheng path planningI used 13 maps as the testing maps and implemented my algorithm, parameters of these maps:
| map name | size | initial point coordinate | goal point coordinate | duty cycles |
|---|---|---|---|---|
| warran | 1108 * 1301 | (740,297) | (430,1013) | 0.347 |
| map 1 | 500 * 500 | (10,10) | (490,490) | 0.2444 |
| map 2 | 500 * 500 | (10,10) | (490,490) | 0.3937 |
| map 3 | 500 * 500 | (10,10) | (490,490) | 0.3985 |
| map 4 | 500 * 500 | (10,10) | (490,490) | 0.2303 |
| map 5 | 500 * 500 | (10,10) | (490,490) | 0.2731 |
| map 6 | 500 * 500 | (10,10) | (490,490) | 0.0681 |
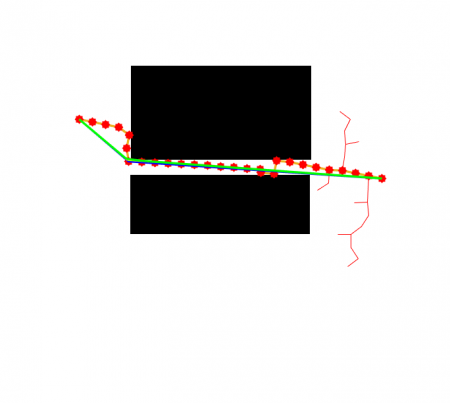
| map 7 | 500 * 500 | (245,10) | (245,490) | 0.126 |
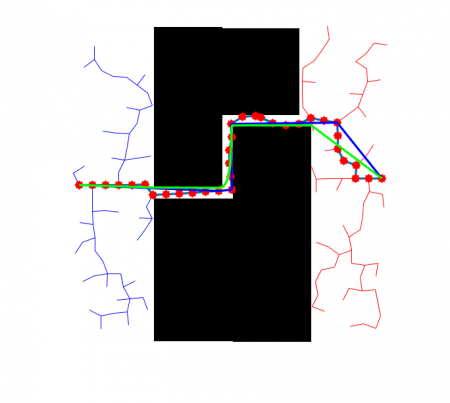
| map 8 | 500 * 500 | (410,40) | (240,300) | 0.1223 |
| map 9 | 500 * 500 | (30,150) | (490,240) | 0.255 |
| map 10 | 500 * 500 | (30,250) | (490,240) | 0.424 |
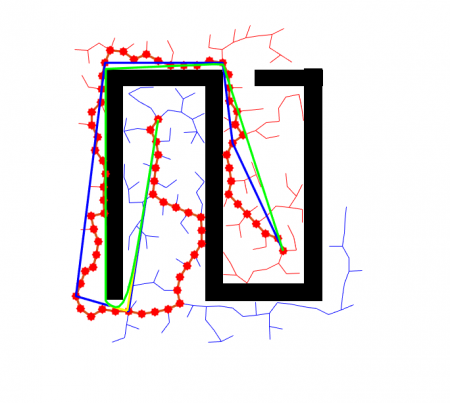
| map 11 | 500 * 500 | (150,150) | (340,350) | 0.146 |
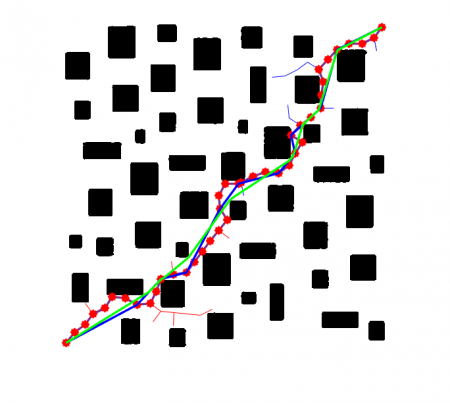
| map 12 | 500 * 500 | (490,10) | (10,490) | 0.254 |