This week, we started to get all the new members know how to build a blimp from sketch.
Next week, we will be working on the altitude control using ultrasonic sensor.
Meanwhile, some ideas that we are thinking about:
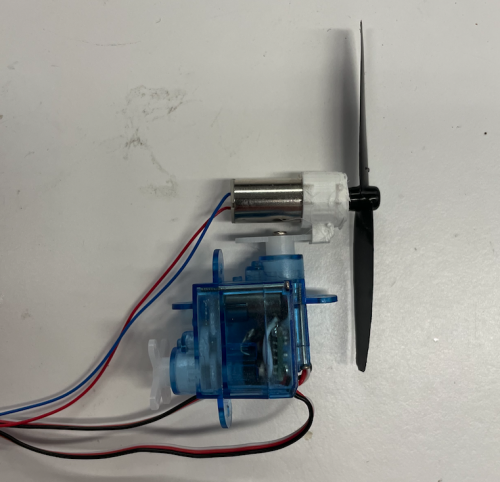
(1) Modify the propulsion system, use only 1 motors at the side of blimp:
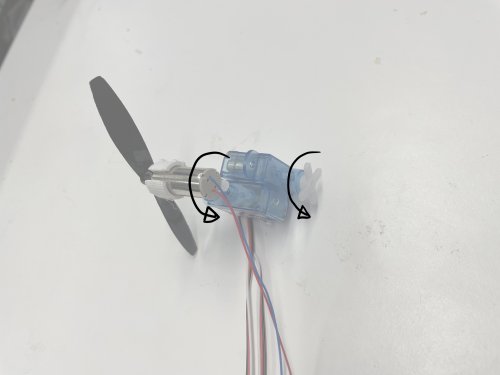
Two different modes of this mechanism:
side-way/forward mode
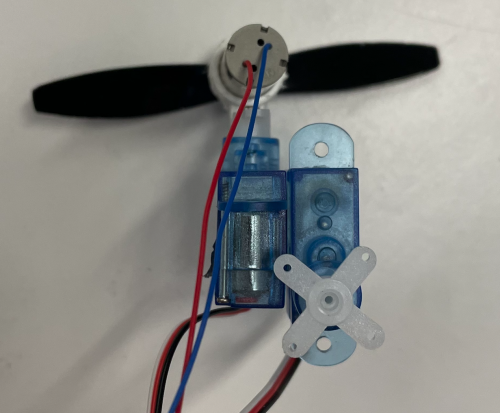
Veritical/forward mode
(2) Onboard Green ball detection methods:
- Try Raspberry Pi and implement a light ML model/ color segmentation algorithm on it
- Try the previous eletrical hardware (esp32 feather board) but using a more stable and robust ML model
- Try s simple ML model (ex: logistic regression) on the ESP32-cam