Project High-Level View
I propose the following as the high level view for designing foldable robots.
ICRA Project Goal
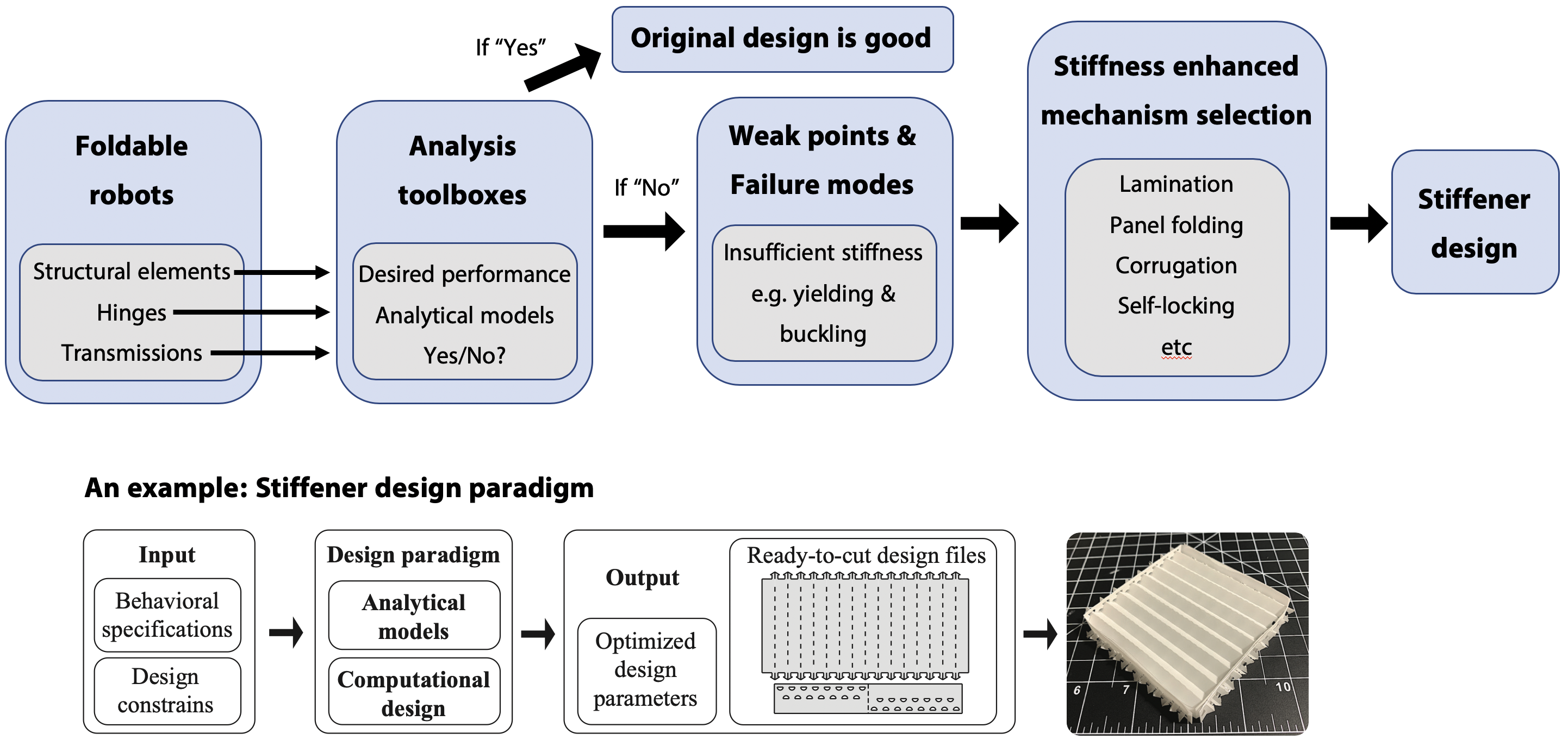
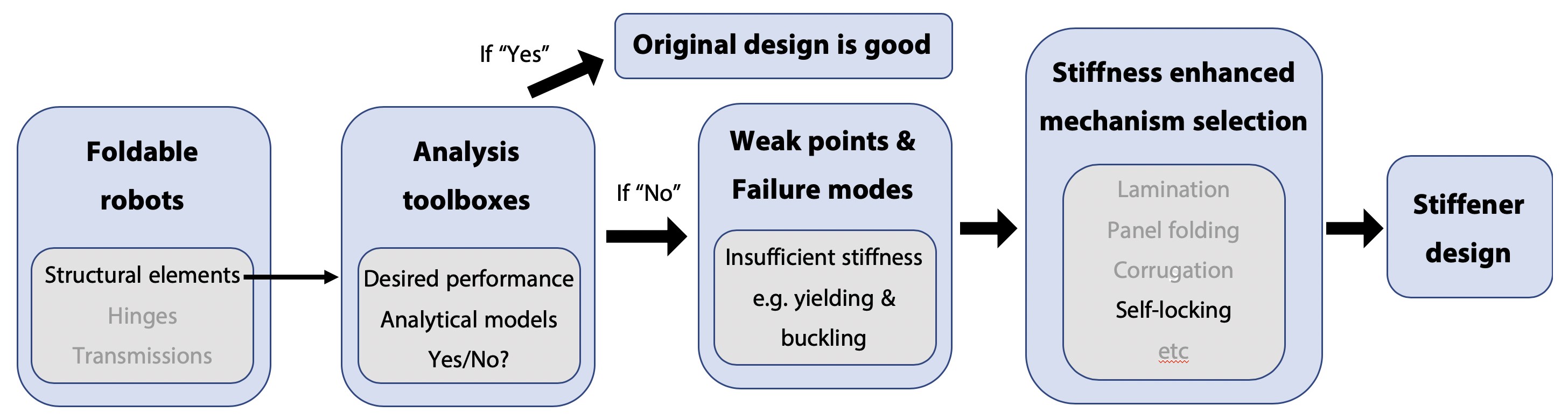
For the next two months, I will be focusing on designing structural elements, which is a major component in foldable robotic systems. I will build analysis design toolbox that will determine whether current design is sufficient to meet desired performance. If so, we will keep the current design. If not, the toolbox will tell us the weak points and failure modes so that we can design stiffeners (stiffness enhance mechanisms) correspondingly. The stiffener design process will follow the same design paradigm as what we have done for the currugated mechanism. The project goal for ICRA 2021 is shown below.
Next Two Week's Goal
There are two parts in my current project: (1) identifying weak point of structure elements; and (2) building stiffener(s) to improve the stiffness. Currently, I am working on part (1).
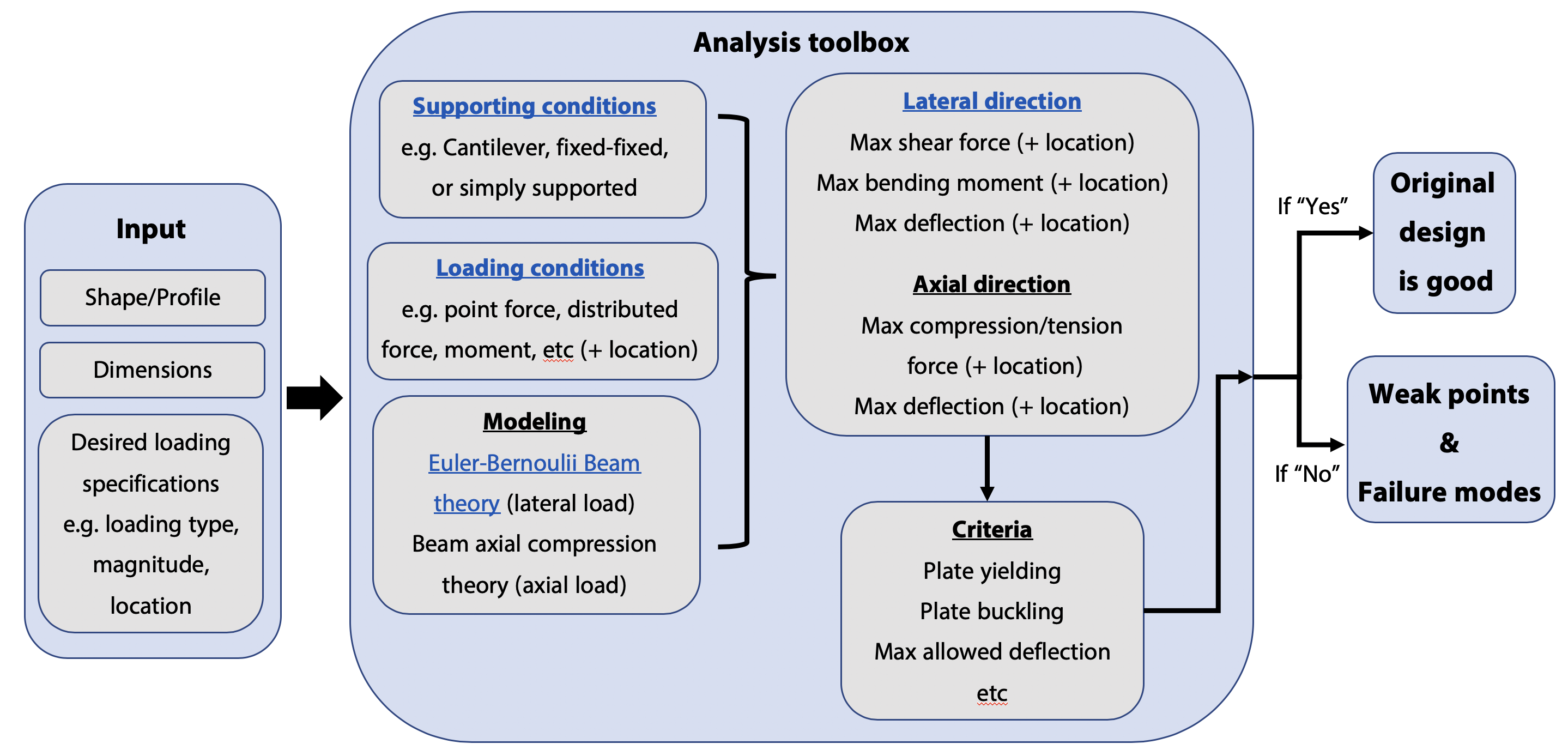
The goal for next two weeks is to develop a design toolbox for structural elements that (1) takes profile, dimensions and loading specification as inputs; (2) determine system stiffness; (3) determine whether the system will fail or not. If toolbox output shows current design satisfies the loading specification, no other steps needed; if not, the toolbox will output weak points and failure mode for future development.
Long Term Goal
In the near future, I will work on other components, following the same logic. Eventually, we will have a toolbox that can take foldable robotic systems as input, optimize them, and ouput improved design that give us best performance.