As part of the trace through of Colo-AT (primarily the Simulated Dataset Manager), one of the issues that arose was the proportionality of the RMS to measurement distance. In other words, as the distane between the robot and the landmark it was measuring increased the assosciated error in estimating...

Over the past week, I've been busy debugging the simulation. A few slight modifications were made to the simulated dataset manager that enabled the user to enter the velocity input distribution, and a slight change was made to how landmark vs. measurement data was selected. One test was comparing...
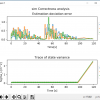
Over the last week I've implemented relative observation and communication support as well as a random data generator for the simulation. Relative observations mean that robots can measure not only distances & bearings of landmarks, but also of other robots. Enabling communication in the simulatio...
Colo-AT and the simulated data generator have undergone a lot of debugging/testing over the last week. I developed testing scripts and also restructured parts of the simlulated data generator to be more re-usable. In addition, I implmented a simpleEKF (Extended Kalman Filter) localization algorithm...
I've successfully gotten the pre-generated data simulation to run correctly for robots moving in a straight line. I used the already-built animated plotting api to view the results in addition to looking at the analyzer outputs. During the debugging process, we discovered that the simpleEKF algorith...
- «
- »