Over the past week, I've been busy debugging the simulation. A few slight modifications were made to the simulated dataset manager that enabled the user to enter the velocity input distribution, and a slight change was made to how landmark vs. measurement data was selected.
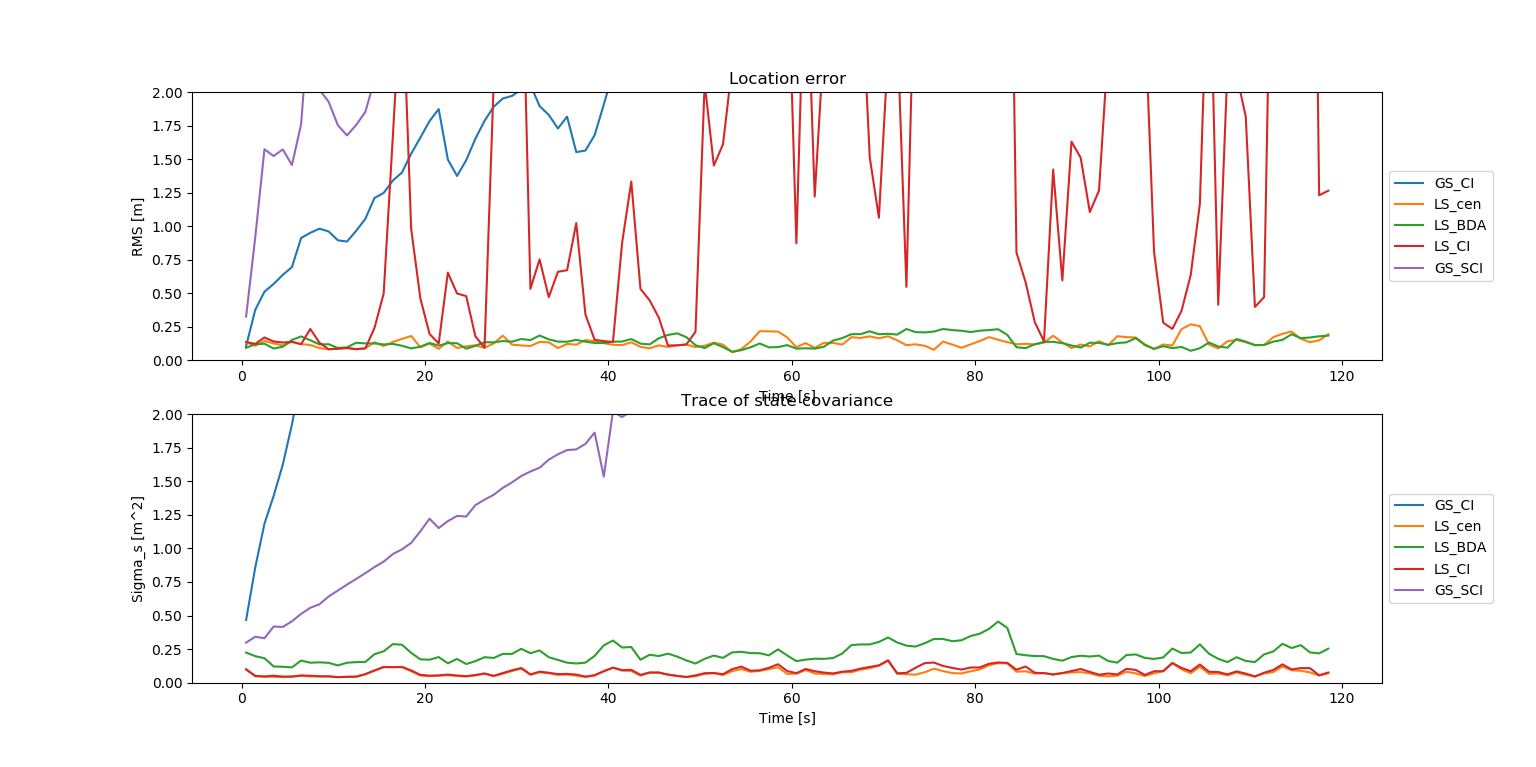
One test was comparing the various algorithms implmented in Colo using both real-world and simulated data. The real-world data used was the Colo official dataset 3 (available on the git repository for Colo)
The simulation of random robot motion for 5 robots appears to be very comparable to the real-world robots which were also programmed to move randomly.
Real world data
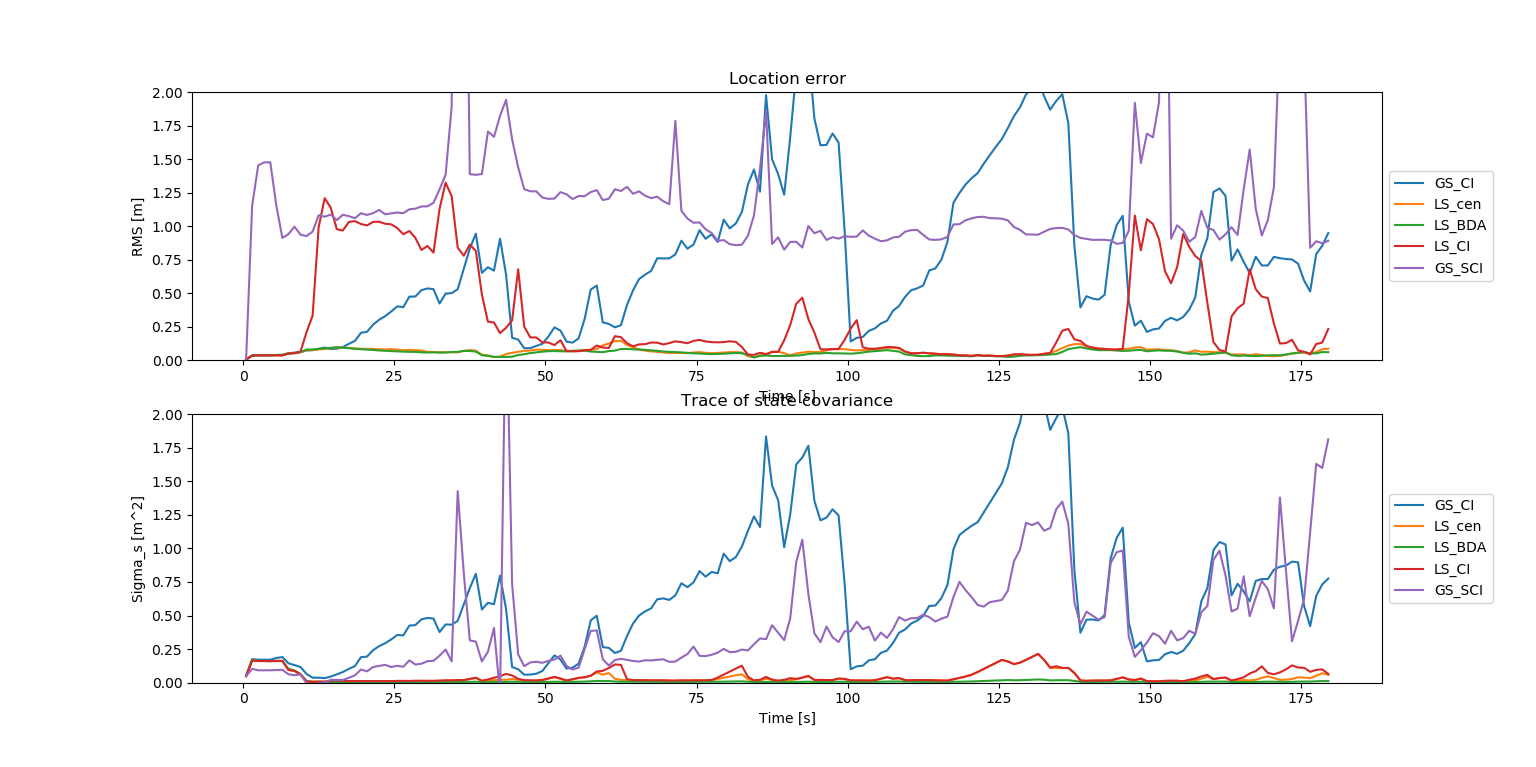
Simulated data