I've successfully gotten the pre-generated data simulation to run correctly for robots moving in a straight line. I used the already-built animated plotting api to view the results in addition to looking at the analyzer outputs. During the debugging process, we discovered that the simpleEKF algorithm implemented with Colo was not working correctly. The next step is to debug the circular path simulation and simpleEKF. The figures below were generated using CentralizedEKF.
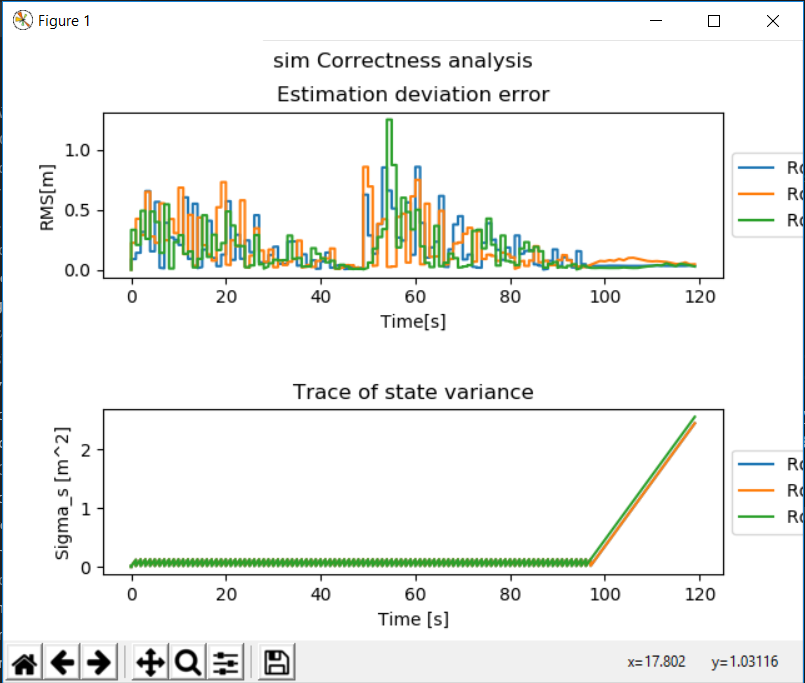 Convergent Centralized EKF for 3 robots moving a straight line, 2 landmarks within field of view.
Convergent Centralized EKF for 3 robots moving a straight line, 2 landmarks within field of view.