Over the last week I've implemented relative observation and communication support as well as a random data generator for the simulation.
Relative observations mean that robots can measure not only distances & bearings of landmarks, but also of other robots. Enabling communication in the simulation enables robots to share data with other robots in the distributed system. The random data generator will be useful in evaluation other algorithms in the simulation as well as verifying other results.
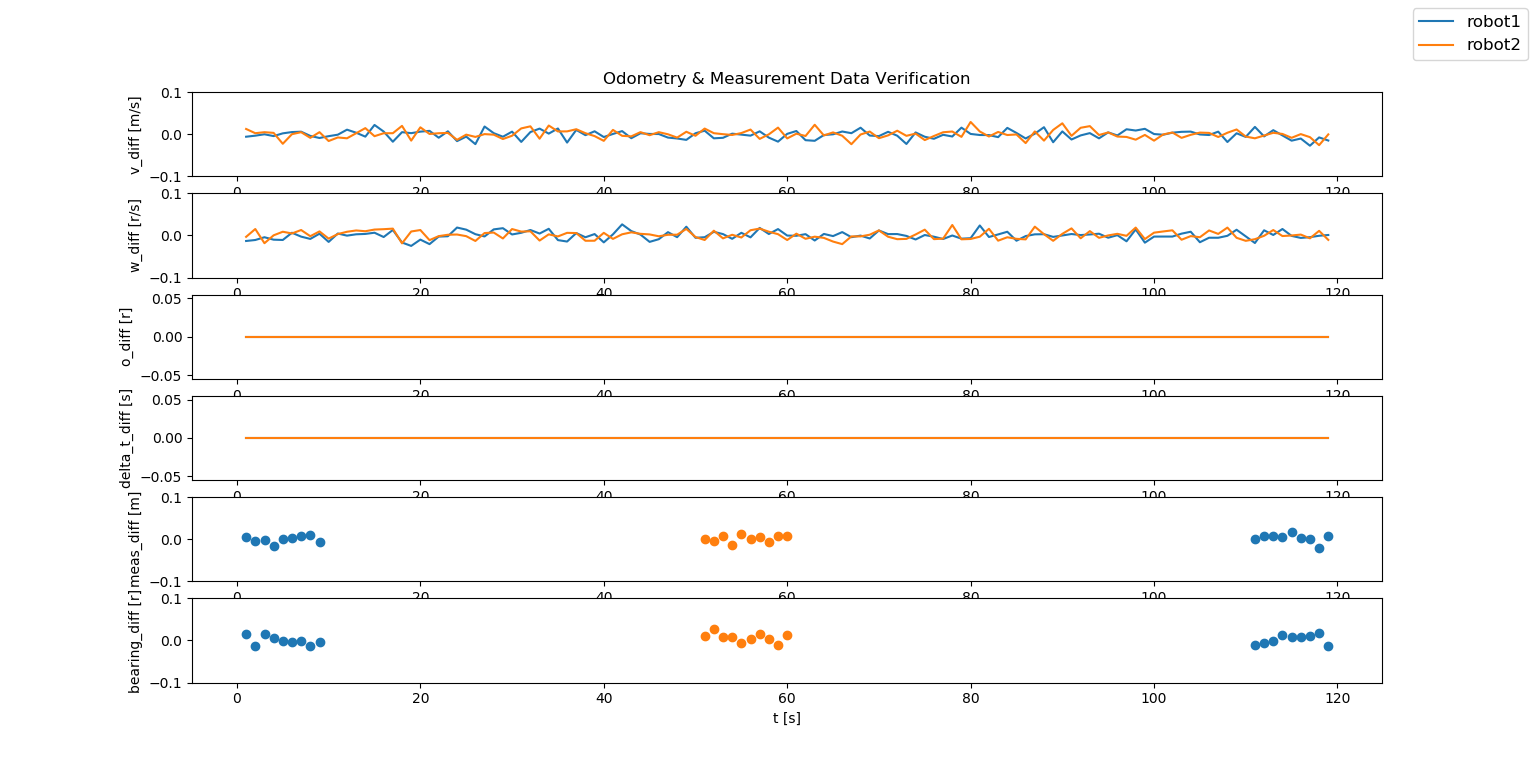
Random motion where robot 1 (blue) cannot take masurements, and is receiving communication data
No landmarks, robots have a limited FOV, and are only taking measurements of other robot when in vision