This week, we started writing instructions for the two wheeled robot. While the level of difficulty to build this robot is not substantial, we found it may be a bit much for middle school students to build as their first paper folded robot. Because of this, we decided to start off with something much simpler that does not require any electrical components like these grippers. A string is pulled to make the fingers of the grippers move..jpg)
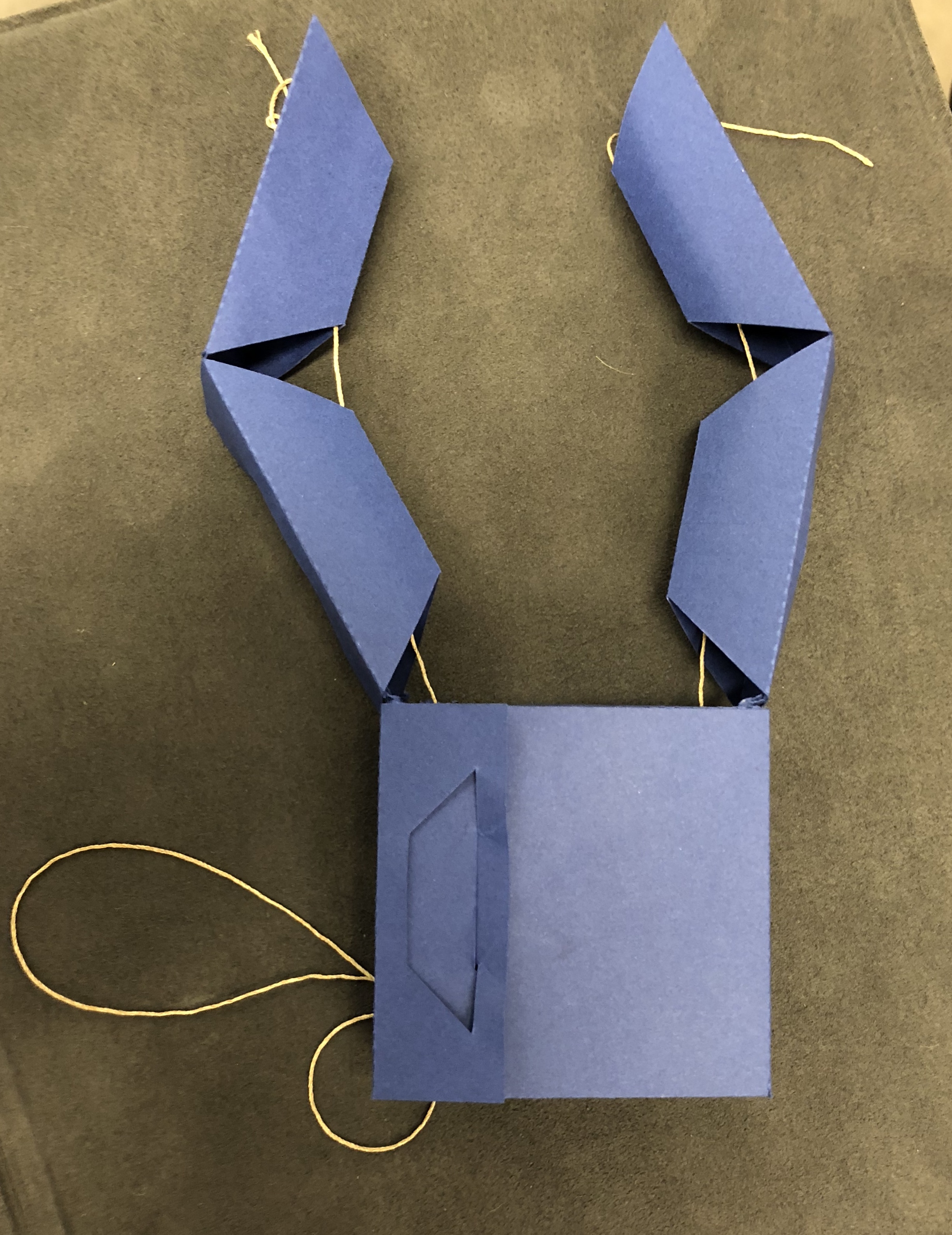
The issue with the grippers is that while the design is much simpler, because the material we are using is paper, they are too weak to pick up almost anything. A different material like plastic could be used to strengthen the grippers, but the focus of this project is finding applications for paper robots specifically. So another design is being looked into to use are our first stage of paper robot instructions.
The fingers of the grippers reminded me of an elephants trunk, so I decided to turn the grippers into an elephant by removing a finger from the gripper and adding a body. All of this was done in Silhouette Studio. This is the 2D template I came up with that resulted in the blue elephant..png)
.jpg)
The trunk is moved by pulling a string in the same way the grippers moved, but there were a few issues with the structure of the elephant. The two biggest problems were that the legs were only secure from one side, so it could not stand, the head was also only secure from one side, so even if the legs could make it stand, the head would swing to one side causing it to fall over. I made some changes and added tabs to both the head and legs so they would be held from both sides. The black elephant is the newest design that is able to stand freely..jpg)
This is the new template for the elephant. .png)
Some minor changes still need to be made like moving some tabs around, but this elephant could be a good, fun project for middle schoolers to do before taking on the car.