Weekly Update - As part of the FORAY team, I worked on building a mathematical model of the blimp on Simulink. I familiarized myself with dynamic equations of the motion of the blimp.
Modeling - Tutorial I used to learn the fundamentals of Simulink – http://ctms.engin.umich.edu/CTMS/index.php?example=Introduction§ion=SimulinkModelinghttps://www.youtube.com/watch?v=vxzR3W2BcRk
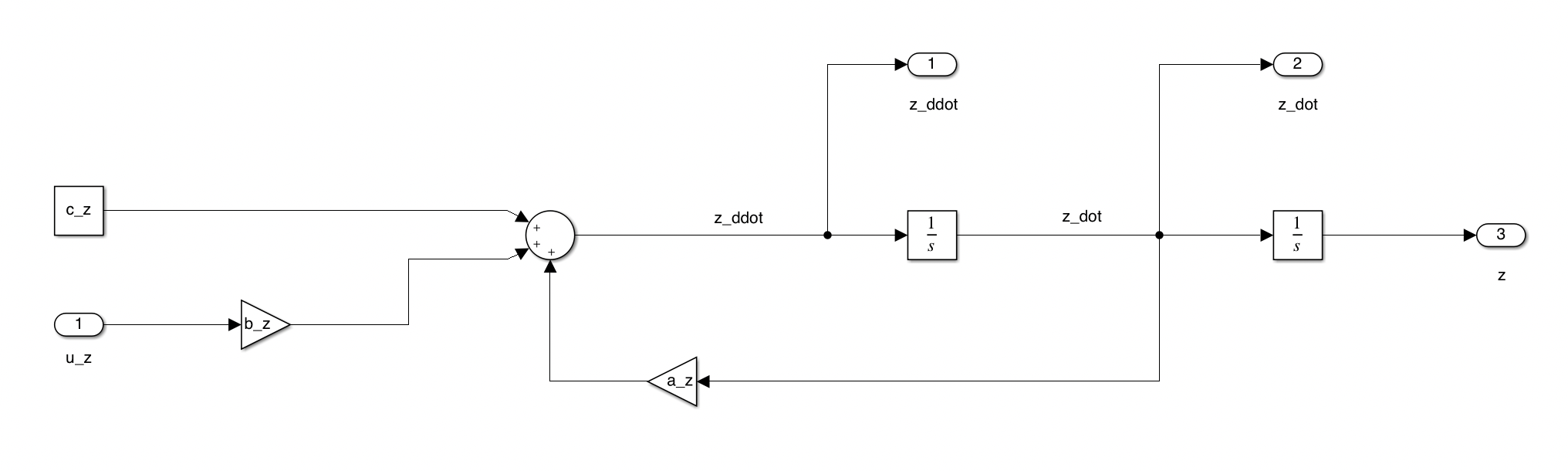
Using Simulink, I was able to build the altitude model for the blimp. The following altitude model uses simplified equations based on the assumption that the yaw and pitch angle of the blimp is constantly 0.
 However, after discussion, we concluded that the assumption that the yaw and pitch angle will not be appropriate for our use case. Hence, we are switching to more complex 6 DOF equations to create a better model.
However, after discussion, we concluded that the assumption that the yaw and pitch angle will not be appropriate for our use case. Hence, we are switching to more complex 6 DOF equations to create a better model.
Interesting Terminologies - As an undergraduate, working with experienced graduate students opens up plethora of opportunities to learn. Here are some of the interesting terminologies I came across during team meetings -
Holonomic and Non-holonomic constraints - https://www.youtube.com/watch?v=A14ArEZ47LE https://alliance.seas.upenn.edu/~meam535/cgi-bin/pmwiki/uploads/Main/Constraints10.pdf
Tait Bryan Angles - https://www.youtube.com/watch?v=wV59Xg-sm70&t=525s
Quaternions – https://www.youtube.com/watch?v=3BR8tK-LuB0 https://www.youtube.com/watch?v=d4EgbgTm0Bg
My first RSS conference – It was a huge opportunity for me to attend the virtual RSS conference this year. I was exposed to some of the complex challenges in the field of machine learning and robotics. I also learned about new breakthroughs and novel ideas in the research community. Some of the papers I found really interesting are -
https://arxiv.org/abs/2006.05398
https://arxiv.org/abs/2007.00178