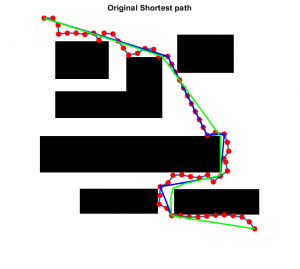
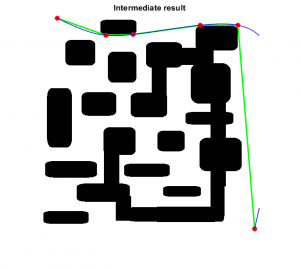
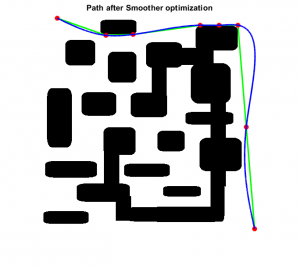
I finished the way point smoother optimization algorithm to replace B-spline curve algorithm to make sure the final smoother path will not collide with obstacles.
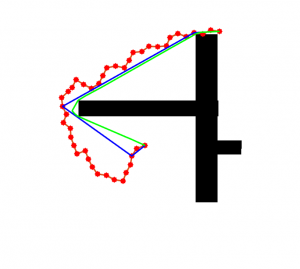
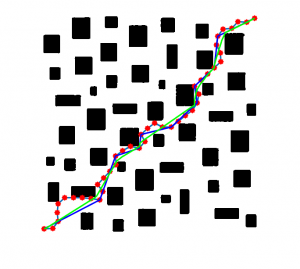
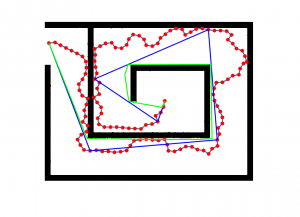
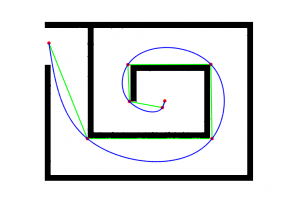
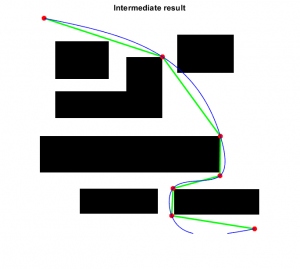
The failure cases:
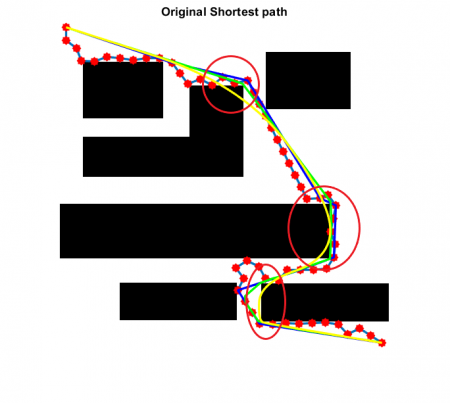
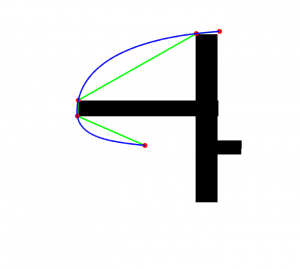
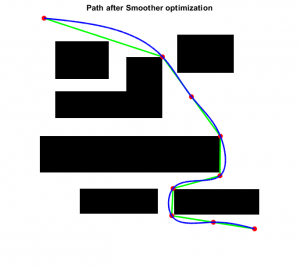
After way point smoother optimization:
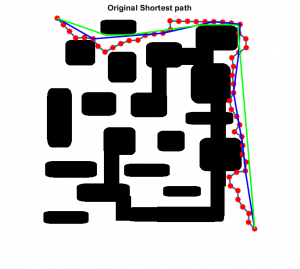
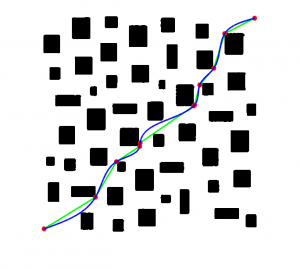
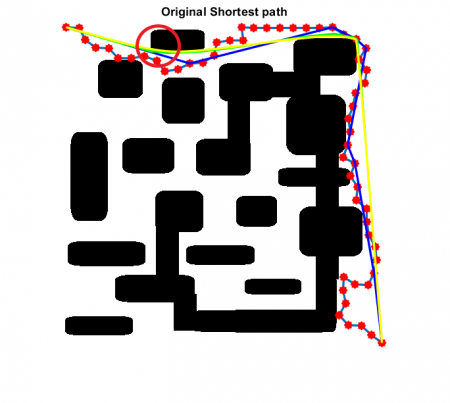
Other cases using way point smoother optimization: