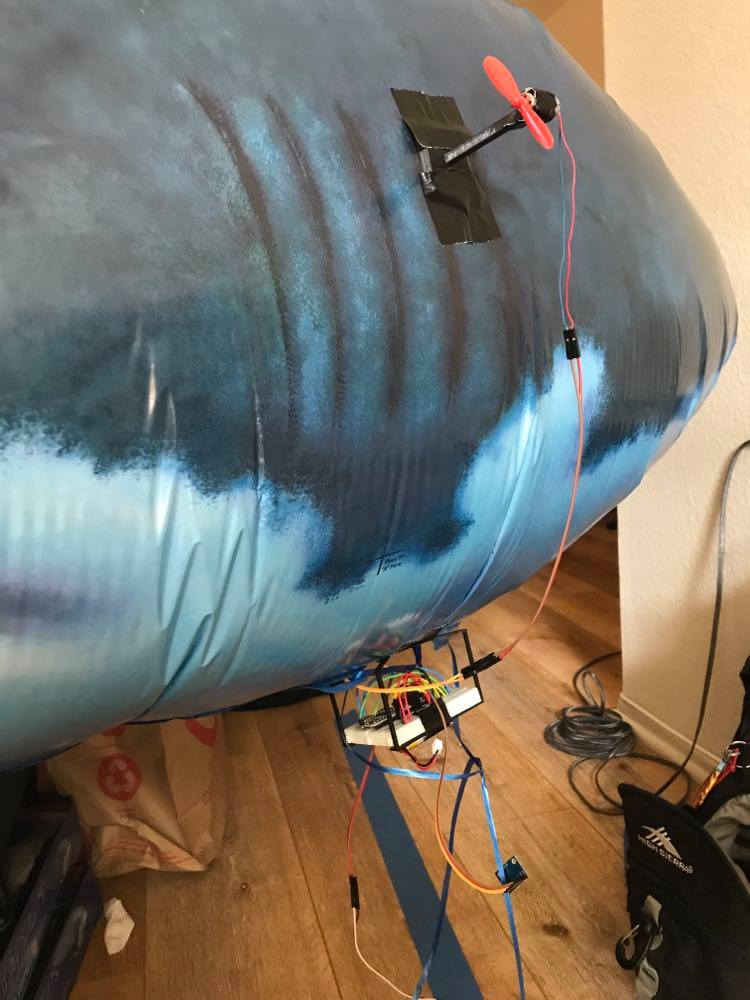
I have spent the past weeks assembling a blimp on which to test a feedback control system to aid in controlling the blimp as well as building said control system. The picture below shows the experimental setup.
So far, the blimp is assembled and controlled based on IMU motion. The video below shows the blimp reacting to the orientation of a 6DOF IMU, which can measure roll and pitch of the blimp using a combination of gravitational acceleration and gyroscope data.
The important metric for the intended feedback control, which aims to reduce/eliminate any turning motions when intending to move the blimp forward or back, is the yaw of the blimp. For this, we require a 9DOF IMU that includes magentic field readings along with acceleration and rotation. I implemented a sensor fusion algorithm that takes the data from this IMU and produces a measurement of roll, pitch and yaw. This program in action can be seen in the video below.
The final step in this process is to develop the feedback controller itself and select gains. This process will be slightly different depending on the blimp itself.
Consequently, this program will need to be modular so that it can easily be integrated with a wide variety of blimp types with little effort. I have implemented the sensor fusion algorithm to be separate from the actual IMU data collection, which allows for any IMU to be used with minimal changes to the program. The feedback control will follow the same architecture.