The main paper we reviewed is the Probabilistic Data Association for Semantic SLAM
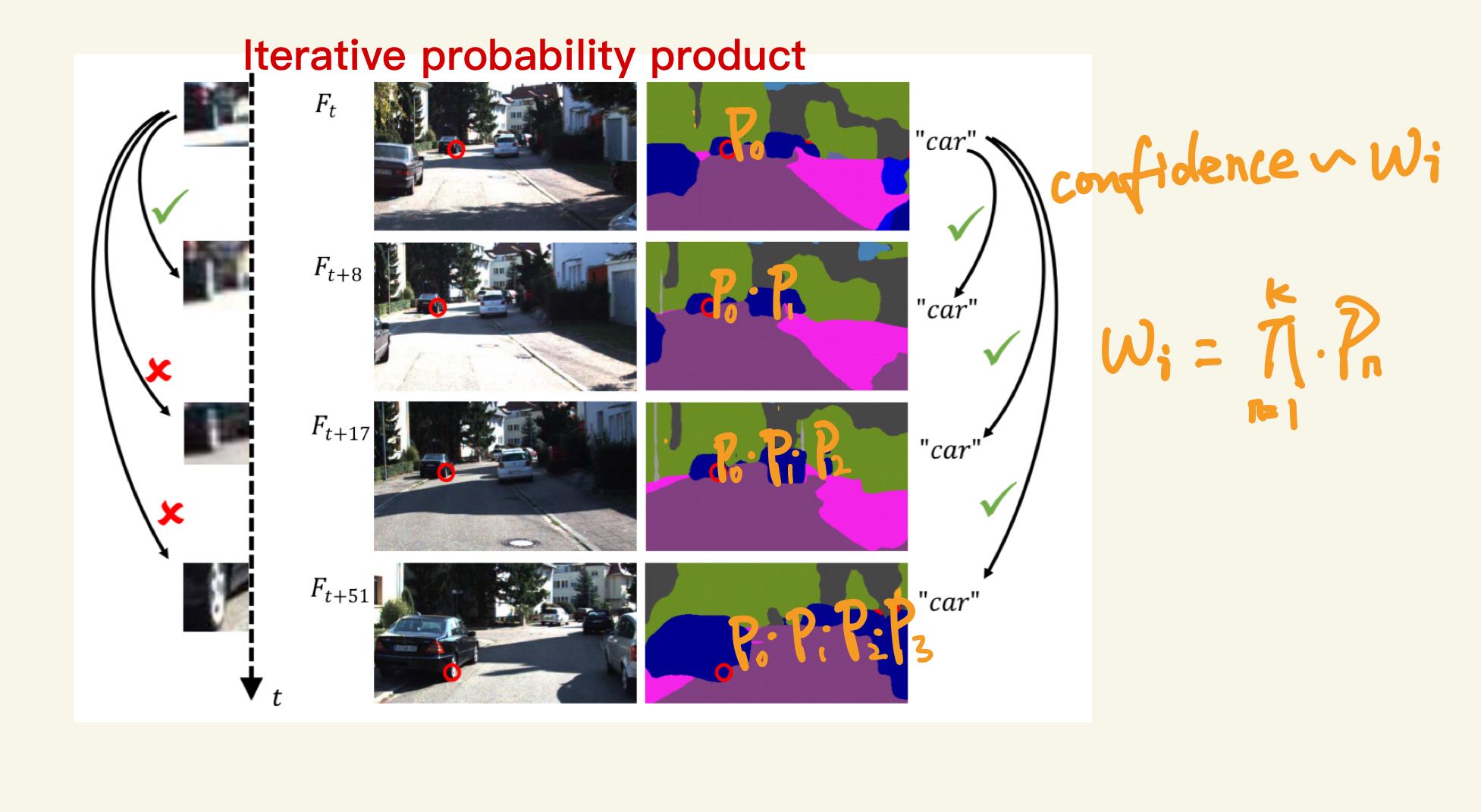
It depicts a promising vista about the probablistic semantic slam. Primarily proposed an EM mathematical framework to consider the detection probabilistic, and using iterative multiply probability way to bring in former frames probabilistic into current frame. VSO: Visual Semantic Odometry gives the first realization of this paper.
 However, there are some insufficient points left to do. Here, I will give the paper review to the uncovered points in this paper.
However, there are some insufficient points left to do. Here, I will give the paper review to the uncovered points in this paper.
1. Key-frame defined by experience/ less solid-confidence to discard or merge frames.
a. Attention-SLAM: A Visual Monocular SLAM Learning from Human Gaze2. No geometry constraint inside one object
a. Tightly-Coupled Visual-Inertial Localization and 3-D Rigid-Body Target Tracking
(Model-free, but regard the features inside the object as the geometry constraint.3. No shape and pose constraint
a. Category-agnostic
i. Cube
ii. Ellipsoids
b. Category-specific
A Unifying View of Geometry, Semantics, and Data Association in SLAM
OrcVIO: Object residual constrained Visual-Inertial Odometry4. Only handle the static senarios, hard to deal with the dynamic environment. (It will be huge error of dynamic objects)
a. Marcov Blanket:
RGB-D SLAM in Dynamic Environments Using Point Correlations。
(conduct the feature graph, long-term static points as the constant landmark; unsupervised classfication into object blankets, if one points was marginalized, the all blanket points will be marginalized)
b. Regrad the moving state as probabilistc:
Object-based pose graph for dynamic indoor environments
(static or dynamic is probabilistic; one objects (one chair) moved, all same class objects (all chairs) will change the status.5. Overlook the distance effect
6. Only use 2d tracking but not 3D:
Stereo Vision-based Semantic 3D Object and Ego-motion Tracking for Autonomous Driving7. Only based on Gaussion hypothesis, but MIT gives non-gaussion solution:
Multimodal Semantic SLAM with Probabilistic Data Association8. Define a clear transition formula from semantic segmantation into probability function:
VSO: Visual Semantic Odometry gives the first realization of this paper.