Origami technique advantages:
-
lightweight
-
compact
-
scalable
-
etc
Origami limitations:
-
lack of structural stiffness
-
malfunction caused by weight
-
difficult to get satisfied design
Examples
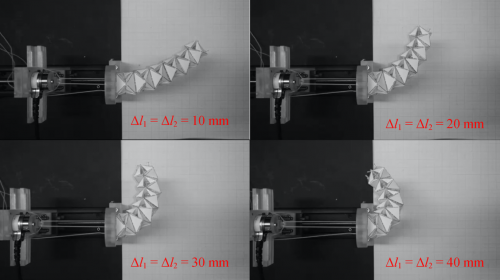
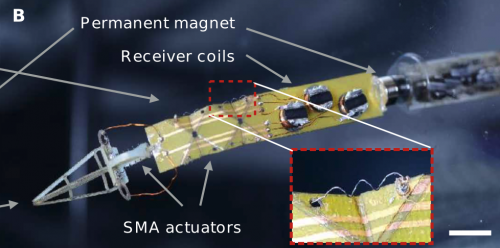
- Zhang et al. 2016: continuum robotic arm. This origami arm can provide large bending and extension movement. But it does not have the capability to lift weight or carry an end-effector, due to the lack of body stiffness. If adding stiffness by some traditional ways (e.g. lamination), the weight of the origami arm will increase, and performance will not be as good.
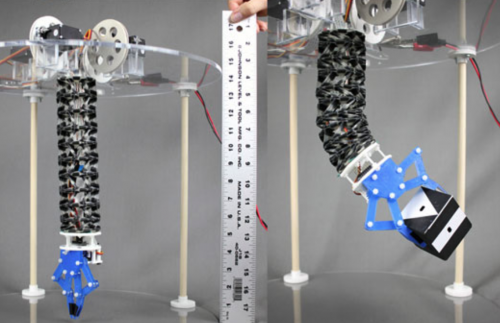
- Lee et al. 2018: an origami arm. "the arm’s configuration and reachable poses are highly affected by the weight at the end-effector." This is caused by the lack of stiffness in the arm foldable design. One solution is to increase arm stiffness. Another possible solution is to build lightweight but stiff end-effector (gripper).
- Sun et al. 2015: a pneumatic foldable gripper. Even if pneumatic has been used to reduce weight, this gripper still can only lift its body weight. This is caused by the lack of rigidity of the body. While, increasing stiffness will lead to increasing weight, which may cause the pneumatic actuation not powerful enough to move the finger. Lightweight but strong design is needed.

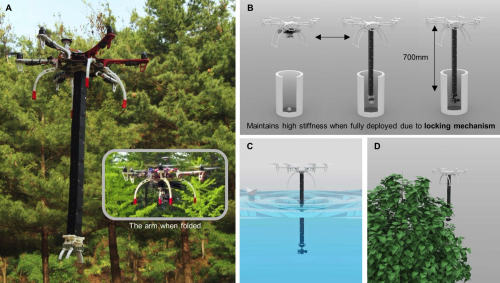
- Kim et al. 2018: a foldable robot arm. The design needs to be relatively rigid and lightweight in order to be mounted to the UVA.
There are other examples that uses small-scale foldable robots to demonstrate concepts, since if you make the robots larger, they usually require more stiffness, weight more, and cost more energy to actuate. Here are a few examples:
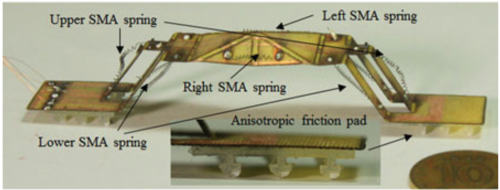
- Koh et al. 2013: an origami crawling robot. It needs to be light weight, otherwise the actuator (SMA) won't have enough strength to move the robot.
- Boyvat et al. 2017: a robot manipulator. it needs to be light weight so as the actuator can be suddicient to manipulate.
What is needed:
- Ensuring adequate structural stiffness without losing the inherent advantages of simple and lightweight origami structure.
What have been done, to address this demand:
-
bistable origami patterns (hard to design) (Kim et al. 2015)
-
shape memory polymer stiffening (hard to fabrication and control) (Firouzeh et al. 2017)
-
layer jamming (hard to design, behavior not well understood) (Ou et al. 2014)
-
chemical stiffening (hard to design and fabricate, hard to control) (Schenk et al. 2014)
-
etc
What can we do to make other researchers' life easier and better:
-
allow user specificied behavior and requirement (e.g. high stiffness)
-
easy to design
-
fast to design
-
easy to fabrication
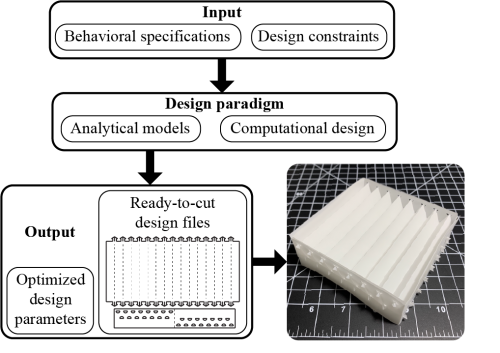
How can we do this: Computational Design
How do we demonstrate the efficiency of this design paradigm?
We will conduct experiments/demos to address reviewers's comments: "how necessary a program to solve this problem is".
To answer this question, first let's consider the efficiency of using our program:
(1) without our program, if one user needs to design an OADLC mechanism, he will need to either do all calculations by hand and draw the design files, or he needs to do trail-by-error, which may or may not provide adaquate behavior before a certain trails (time).
(2) using our program, users, even without experience in designing origami structures, can simply and instantly get the design files that can be directly and easily used to make OADLC mechanism to work on their robotic system. It is fast, intutive and easy to use.
Moreover, we will demonstrate that, with and without our design paradigm, the robotic system will have different performance, e.g. pass or fail.
Along with the efficiency advantage of using our design paradigm, we want to use a demonstration to prove the following two points:
(1) increasing stiffness using our proposed OADLC mechanism will increase the functionality of a robotic device.
(2) minimizing weight will be necessary for the robotic system to operate functionally, too heavy will cause failure.
In order to do it, we plan to do the following demonstrations:
(1) we will design an origami gripper, using flat fingers with low bending stiffness. We will mount this flat-finger gripper on a blimp (with ~ 20g payload capability, even 1 gram of change in the gripper design will have a significant effect on the performance).
(2) we will use the gripper to pick up weights and show flat-fingers defect, casuing the grabing to fail. (This will show without our design, the gripper is not functioning well.)
(3) we will add our optimized OADLC mechanisms on to the same failed gripper, grab the same weight and lift it up. (This will show the functionality of using our design.)
(4) we will use an un-optimized design (heavier) and show even we can grab the weight successfully, we can not lift it, it's over the payload capacity.
- thanks to Wenzhong and Jiahao(Nick) for providing assistance.