I implemented the preintegration techniques from this paper.
In order to implement the preintegration, the underlying optmization problem structure is also change. To be precise, previously, we optimize all the IMU data point, but now we only optimize the keyframe.
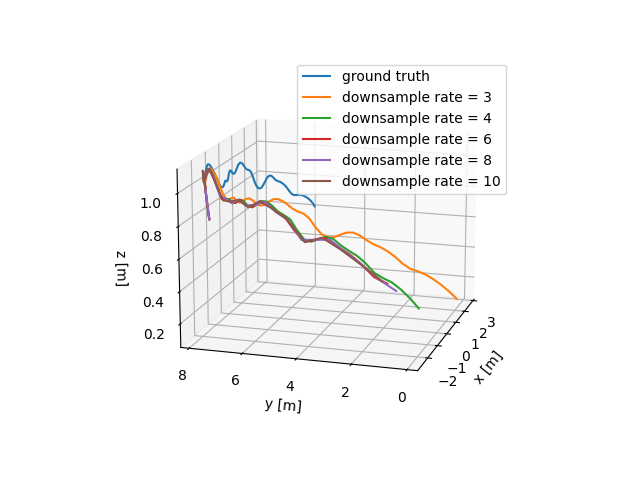
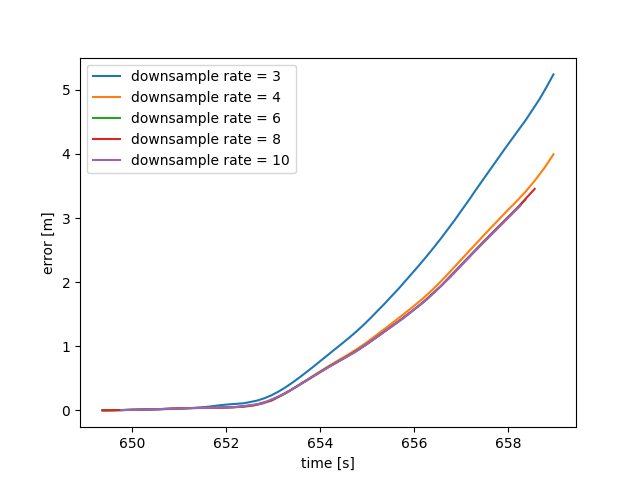
The trajectory plot show that the preintegration result demonstrates the similar trend, but the error grows with time.
The next step is to implement the local parameterization of rotation.