
I was looking for ways to control the motors using peripheral hardware. I initially used Keyboard to control the motors. The input characters were sent to an ESP32 device (Master) via serial communication. The data was sent to another ESP32 device (Slave) connected to the motor drivers. I used a 2.4...

I've completed the first distributed prototype blimp at home. I adapted 2-1 motor configuration and it has 3 DOF: The control video demonstration: Some observations: The steering is really difficult to control because I only use one slider to control the speed of all motors. And it needs t...

Recently, I have been working on connecting the ESP Wifi Module and the Blynk software. I have been looking into both emulation and ESP Now. Additionally, the Blynk software for controlling the motors does have capabilities with Bluetooth, so I will also be testing the Blynk software with my HC-05 m...
Microcontroller - ESP32 Motor Driver - TB6612FNG Dual Motor Driver Propeller Size - 45mm (diameter) Communication - WIFI Module using Blynk I also found out that ESP32 does not have a native implementation of the AnalogWrite function. This has led to problems for PWM. I will look for a...
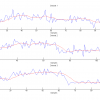
In order to improve the inertial measurement capabilities of the blimps on the Foray project, I have been working with Zhaoliang to implement various filtering algorithms for the altimeter data we collect. So far, I have used Matlab to create both an exponential filter and a moving average filter....

The past two weeks, I have been developing different balloon facing mechanisms with the goal of creating one that improves the blimp's capability to control the balloon. My first idea was to build a "fence" made out of barbecue skewers and mount it onto the top of the blimp. The idea was that th...
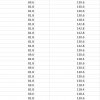
This week I also tested the power consumption while operating the blimp. The test is run under the setup that: 2 motors are running the whole time in 80% PWM 500 mAh 3.7v lipo battery The initial voltage of the 3.7v battery is 4.16v, which is fully charged. And I measure the voltage of the bat...
This week I conducted the test simulating a single blimp in the competition capturing the ball and send it to the goal. The components in the test are not exactly the same as what will be used in the competition, however, it is still a good test to show the capability of the blimp. here is the v...
I have been working on testing power consumption. Below are the results for the brushless and brushed dc motors we currently have. This means that with a 1000 mAh battery, we can run one of these motors for about seven hours. This result is quite good, but I need to extend the test for longer an...

Knowledge of a lighter-than-air vehicle's orientation is an essential initial step in ensuring stable operation. I have been working on implementing a sensor fusion system for the blimps on the FORAY project. The current implementation uses a 6-DOF IMU, the MPU6050. The experimental setup can be...