
I'm testing different motor + propellers combinations since we change our control board to feather board esp32. And I will use feather board as the development toolkit in the paper, so it's necessary to test these combinations because the thrust and weight are the input parameters to our system. ...
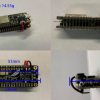
The feather board stack is a little bit heavy (22.3 g) so I tried the soldering way to assemble different motor board and esp32 feather board, which is only 14.55 g as shown in the following figure: The soldering stack mode is also lighter, which is 22.67g now as shown in the following figure, a...

We had learned from the non-ML-based ball detection algorithm that a color-and-contour-based algorithm cannot always detect the ball with enough accuracy. As a result, I have been developing an ML-based platform for training a model with multiple images of the ball and identifying a bounding box aro...
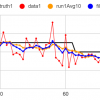
Last week, I worked on filtering three independent data streams from barometers using a simple Kalman filter. The output is given below: The black lines represent the ground truth, the red dots represent each data point, the orange curve represents the output of a running average filter with 1...
This week, I fixed some bugs in my previous code and wrote a new program to visualizethe live streaming data I also conduct more experiments to verify my real_time streaming code: Meanwhile, I've been working on the Opti-track system and try to get it to work for multiple rigid bodies. The...

This week, I used Raspberry Pi camera to collect the image data of multiple green balls as shown below. All the code and data are in the github

This week, I used BLYNK app to manually control the feather board with 4 motors. The code has been uploaded to the git The situation is shown in the video: Next step: Remote control servo board Remote control motor board and servo board at the same time Use game controller and webSock...

This week, I also tested some properties of the motor board, like the relationship input and output relationship between battery and motors. So I try three different setup: The small motor with small propeller The big motor with bigger propeller Both: Try different batteries with a...

This week, I've tested the servo limitation and figure out a way to determine the correct maximum and minimum limitation for different servo motors. So in the example code and in the tutorial, it says: Using the example code, edit SERVOMIN until the low-point of the sweep reaches the mini...

This week I wrote a code to save and visualize the streaming data off-line from opti-track system. The code is now in the github I try different rigid body object in our opti-track system: one of which is on a unmanned vehicle and it's video is shown below. Since the rigid body markers are s...