In this video, we use color threshold algorithm to detect the goal and output the center of the goal from terminal (Though it was not showing in the following video).
One video snapshot from our flying test after we debug it: After first, it performed pretty bad since the color we previous took was from conference room. But after we tweak parameters, it was better in the lab environment.
I tested the color threshold algorithm on the live video from ESP32-cam: This is the demo with low resolution: This is the demo with high resolution:
Color threshold + web cam: Video size: 800 * 500 ML model + web cam: Video size: 400 * 250 The reason why this is slow most of the reasons are because this section takes too long to run: # take too long this step for i in range(h): for j in range(w):...

ESP32 Cam Range check This week we tested the Wi-Fi connectivity range of ESP32 cam with and without antenna. ESP32 Cam with Antenna: We were able to achieve a range of 130ft. When it reached 130ft it had slow response time. ESP32 cam without Antenna: We were only able to achieve a range...

This week, we started to get all the new members know how to build a blimp from sketch. Next week, we will be working on the altitude control using ultrasonic sensor. Meanwhile, some ideas that we are thinking about: (1) Modify the propulsion system, use only 1 motors at the side of blimp...
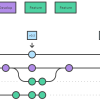
Problems that I've been thinking about: How can collaborative code development be more efficient? How do avoid conflict when multiple people are developing? How make the code more readable, easy to maintain and debug? A successful Git branching model: (Simplified version) A example...

We manually turn the green_ball_capture condition into True and tried to let blimp get into the hoop: The successful attempt with manual True condition:
