
Different configuration that I have tested: 4 motors configuration 2 motors + 1 fin configuration 2 motors + 1 fin configuration What is needed for the next step: origami gondola origami motor holder 3D printed motor holder:

I have spent the past weeks assembling a blimp on which to test a feedback control system to aid in controlling the blimp as well as building said control system. The picture below shows the experimental setup. So far, the blimp is assembled and controlled based on IMU motion. The video below...

Specifications of the system - Blimp with 2 motors used for horizontal propagation connected to ESP32 microcontroller (Slave Device) NodeMCU with ESP 8266 acting as the master device 2.4GHz with ESP Now protocol is used for communication between the 2 devices A joystick controller is used...

This experiment demonstrates that by using ESP Now protocol we have the capability to control multiple blimps from a single joystick controller. We can switch between different control modes at the click of a button. In the following video - 1 ESP32 microcontroller is connected to the motors. 1...

In this experiment, we want to control vertical manuver the balloon of by controlling the fins. We took the fin control part of air swimmer clownfish balloon and integrated into our system. In the following video, we showed how to improve and integrate the fin controller into our system step b...
I have added time remaining functionality to the power consumption board that I have. However, it is not refined and therefore has a few caveats for use. The program assumes that the battery is at full charge upon program start. While there is no current through the sensor, the time remaining wi...

This week i fabricate a defender balloon. It's made of two sphere balloon while there is net between them.
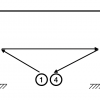
This week, I compare two different motor configuration as shown below. The test is run under the setup: A commander controls the blimp to touch both sides of the wall and then go to its starting position, the time cost is recorded. Each configuration of the motors will be tested 10 times...

This past week I have developed a framework for motor feedback control using IMU (orientation) data. I first wrote scalable motor control software for interfacing with the tb6612. A quick test operation can be seen below. Motor Test: Your browser does not support the video tag. I then integr...
In the past week, I did an experiment on controlling 2 blimps using Blynk app. The videos are shown as follows: The short version: The long version: The settings for two blimps are as follows: The Dolly fish has 4 small 12mm motors: 2 for horizontal control and 2 for vertical control ...