
Based on the new rule: No use of adhesives for capturing game balls. We now need to design a ball capture mechanism without using adhesives. Some requirement about this capture mechanism: Functionally, it should be able to easily catch and release the ball From design aspect, it should be l...

I've been thinking about the next direction I can put into my DARPA paper. I'm puting some ideas together, the overall framework is that I would like to solve a multi-agent planning problem: Here are some relative concepts that tight into this problem: Multi-agent planning: multiagent plan...

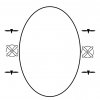
This week, the research question that we are trying to explore is what is the impact of weight distribution on performance. The theoretical analysis is as follows: One of the impact is that weight distribution will change the line of action of the force, and also will change the cross-section-are...
Code: jupyternotebook Sample of result(on single object, multiple objects with different color also work):
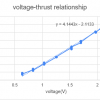
Last week, I setup a system to verify the mapping between thrust and voltage. The experiment setup as follows: Materials:digital scale, 3D printed stand, motors, propellers, NodeMCU 8266, breadboard, Dupont wire, motor driver A schematic diagram of measuring thrust generated by motor propelle...

I had a Crazyflie assemble and tested in the lab: At firs, it was really hard to manual control and I made it died for lots of times: After lots of practise, I can finally manually control carzyflie quadrotor in a good way: Some observation and learning from this experiment: It was...
This quarter, we have more students joining our group. Now we have some new members: Lei Zhao, Yifei Chen, Hongyi Li, Pehuen. And old team members: Parth, Ethan. The old gitlab link is here We now post everything on public github: https://github.com/zhz03/209_project_Blimp_modelling Our week...
Paper Paper milestone write up: The link: https://www.overleaf.com/read/zkyzhqtbyvvk It's very welcome to have your comments and feedbacks. Thoughts about validation: Design parameters: Figure out a easy way to measure the design parameters of the physical blimps, the parameters space...
Structure: 4 motors configuration (attackers) 3 motors configuration (defenders) Special case with the strong thrust Electronic system There are several components in our electrical system: Control board: NodeMCU-esp8266 Motor driver: tb6612-fng Motor : 8.5 * 20mm Propeller...

Authors: Parth, Zhaoliang The details can be found in the github Motivation Previously, we introduced about how to control multiple WIFI-based control board through Blynk app. Though it's also convenient, it has two main drawbacks: The local Blynk server requires devices to have differe...