
Different configuration that I have tested: 4 motors configuration 2 motors + 1 fin configuration 2 motors + 1 fin configuration What is needed for the next step: origami gondola origami motor holder 3D printed motor holder:

In this experiment, we want to control vertical manuver the balloon of by controlling the fins. We took the fin control part of air swimmer clownfish balloon and integrated into our system. In the following video, we showed how to improve and integrate the fin controller into our system step b...
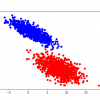
I'm upgrading my 1d binary hypothesis testing algorithm to sampling based n-d binary hypothesis testing algorithm: Right now, I'm verifing a sub-function "sampling from probability distribution - nd" using the following verification flowchart: I've finished 1-d test, moving on to 2-d test. T...
In the past week, I did an experiment on controlling 2 blimps using Blynk app. The videos are shown as follows: The short version: The long version: The settings for two blimps are as follows: The Dolly fish has 4 small 12mm motors: 2 for horizontal control and 2 for vertical control ...

I've completed the first distributed prototype blimp at home. I adapted 2-1 motor configuration and it has 3 DOF: The control video demonstration: Some observations: The steering is really difficult to control because I only use one slider to control the speed of all motors. And it needs t...

My new journal paper "BTO-RRT: A rapid, optimal, smooth and point cloud based path planning algorithm" has been successfully submitted to Journal of Intelligent & Robotic Systems(JINT). This work is supported by the Laboratory for Embedded Machines and Ubiquitous Robotics(LEMUR) @UCLA, the Dron...
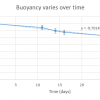
The problem of air leakage is a problem that every balloon has to face. We need to know and understand the air leakage situation of the blimp that we are going to use in the future. The following two pictures are situation of balloon in day 1 vs. day 28: I recorded some data in the past 28 day...
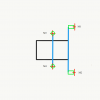
We designed a reconfigurable gondola and motor beam that could allow us to test different thrust configuration efficiently. Here are two examples: The different configuration that we would like to test: (The following figures are all top view) The research questions that we want...

I've integrated all the components and tested the manual control. The necessary components for manual control are: Control board: NodeMCU Motor driver: tb6612fln Motor + 55mm propeller 1000 mAh 3.7v Li-po battery This hardware configuration allows the blimp to perform these operations...
During the blimp WIFI manual control experiment, I noticed some interesting phenomena. Even the following experiments are just some failure examples, I still can learn something from it. Failure experiment 1: The reason the balloon hit the wall was because human operational mistakes. When you...