Demo: Blimp can recognize and move toward a green ball using color detection(the current blimp setup) Blimp is capable of seeking the ball by rotating itself Blimp is capable of moving toward an identified green ball Blimp is trying to capture the green ball using the capture basket Under...
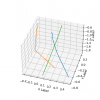
The experiment I run in our lab this week is basically the altitude control test. The setup is as follows: Part of the data that I got from our system: The altitude info: The rotation in the altitude changes is also captured: Next I'll imporve the code to process the information(ro...

I'm still testing the property of different motor + propellers combination. Right now, since I also got the requirement from the AR blimp, I'll add one more test on to my previous experiments. The current experiment setup: So the properties of motor + propellers that I will cover in my exper...

I've had several flying tests this week to see how does feather board esp32 performs. Before I started the flying test, I need to configure the motor setup using inputs commands: The flying test of moving forward: an other angle of view: So this phenomenon(The forward motor completely...
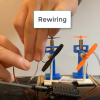
I've finished the code that could by changing the input commands to get the correct FBUDLR(forward/backward/up/down/left/right) motor outputs: Use case: how to get the correct motor outputs after someone rewire the hardware The code is now in the github
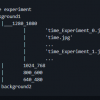
This week, I've collected the green ball data with distance from two different scenarios: 1) Lab background 2) Conference room background The green ball data is constructed in the following tree structure: distance experiment |___background1 |___1280_1080 | 'time_Experime...

Since I'm starting to test different configurations this week, it would be easier if we could change the control accordingly. Right now, I've successfully adjusted forward/backward/up/down control even people have messed up with the wire connection in the wrong way. This is pretty useful since in...

I'm testing different motor + propellers combinations since we change our control board to feather board esp32. And I will use feather board as the development toolkit in the paper, so it's necessary to test these combinations because the thrust and weight are the input parameters to our system. ...
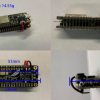
The feather board stack is a little bit heavy (22.3 g) so I tried the soldering way to assemble different motor board and esp32 feather board, which is only 14.55 g as shown in the following figure: The soldering stack mode is also lighter, which is 22.67g now as shown in the following figure, a...
Last week, the engineering effort was focused on setting up the hardware and building the blimp and any other required electronic components. Initially, we couldn't set it up using the balloon that we bought from Amazon, so we had to reuse the blimp that was used in the previous tournament. Due to t...