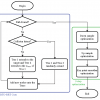
This week, I fixed some bugs in my previous code and wrote a new program to visualizethe live streaming data I also conduct more experiments to verify my real_time streaming code: Meanwhile, I've been working on the Opti-track system and try to get it to work for multiple rigid bodies. The...

This week, I used Raspberry Pi camera to collect the image data of multiple green balls as shown below. All the code and data are in the github

This week, I used BLYNK app to manually control the feather board with 4 motors. The code has been uploaded to the git The situation is shown in the video: Next step: Remote control servo board Remote control motor board and servo board at the same time Use game controller and webSock...

This week, I also tested some properties of the motor board, like the relationship input and output relationship between battery and motors. So I try three different setup: The small motor with small propeller The big motor with bigger propeller Both: Try different batteries with a...

This week, I've tested the servo limitation and figure out a way to determine the correct maximum and minimum limitation for different servo motors. So in the example code and in the tutorial, it says: Using the example code, edit SERVOMIN until the low-point of the sweep reaches the mini...

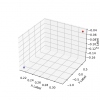
This week I wrote a code to save and visualize the streaming data off-line from opti-track system. The code is now in the github I try different rigid body object in our opti-track system: one of which is on a unmanned vehicle and it's video is shown below. Since the rigid body markers are s...
I've been testing the adafruit feather board software and hardware recently and I found some very interesting problems: Upload program In the windows, when upload program to the feather board, it doesn't have to press the reset button. But in the Linux, it has to press the button in order...
According to the reply from the editor of Journal of Intelligent & Robotic Systems(JINT). The system returned it back to author because it was incorrectly submitted. I'm still communicating with the editor to find out why. The previous reason I thought was I need to link the repository, which it h...

Last weekend, I manufactured a PE balloon envelope. Here is the manufacture process: The PE balloon after inflated: The total lifting capacity is about 41 g. The total weight of the electronics of the control and sensing part is about 27g:

Current progress: In the past week, I tested the opti-track system streaming function. Before, after I used opti-track to capture the motion of our flying blimps, I had to manually import the data to a csv file and then process the csv file. This whole process took a very long time since in the...