Structure:
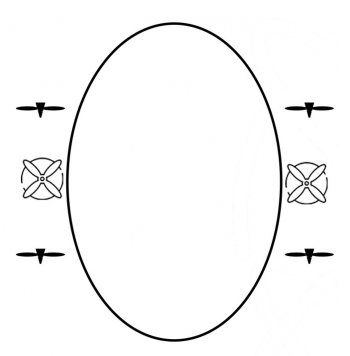
- 4 motors configuration (attackers)
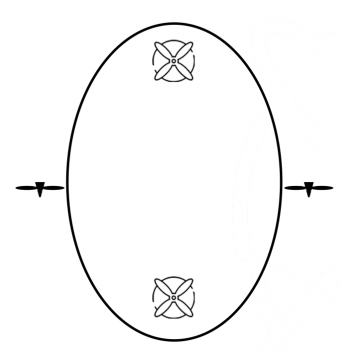
- 3 motors configuration (defenders)
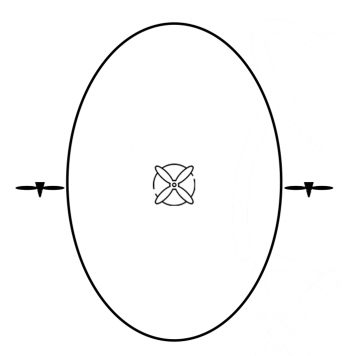
- Special case with the strong thrust
Electronic system
There are several components in our electrical system:
- Control board: NodeMCU-esp8266
- Motor driver: tb6612-fng
- Motor : 8.5 * 20mm
- Propeller: 65mm
- Battery: 1200mAh Li-po battery
- Camera: FPV camera
- FPV battery: 350mAh Li-po battery
- Wire wrapping technique to wire everything
- FPV monitors: 48 channels
Strengths:
- Turning ability is great.
- Overall weight is light <= 75g.
- Peer-to-peer communication.
Weaknesses:
- It’s a little bit hard to control the horizontal movement. More specifically, to control it to go straight line is hard.
- The vertical thrust is not powerful enough.
- Ground control have to go through laptop, not portable.
Strategy
Defensive strategy:
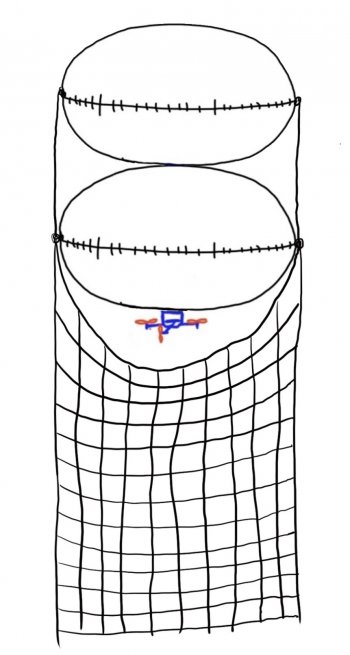
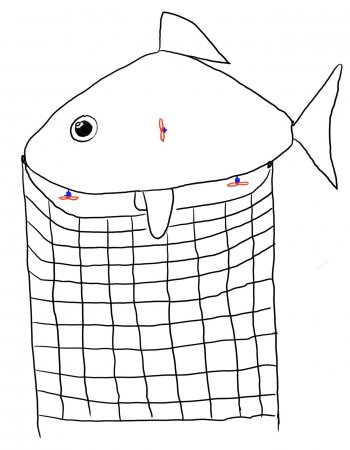
- Our defense strategy is to have a balloon that carry the net and let it hover in front of our hula hoop.
- The defender blimps are shown in the figures.
- The defender blimps need to have big inertia so that it won’t easily be pushed away by other blimps.
Offensive strategy:
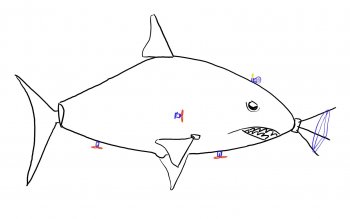
- We used shark fish balloon as our attackers since its aerodynamic characteristics are great.
- We put Styrofoam at its nose and insert the stick into it, wrap double-sided tape around. This is our capture mechanism.
- All of our offenders will chase different balls in the field in order to maximize its chance of catching the ball.
Challenges
In the competition, there are lots of challenges:
- The airflow is so strong that we lost our control when blimps were in the middle of the airflow
- The double-sided tape at the front of shark nose is so adhesive that it causes blimps to attach to the hula hoop when it get closed to it.
- When blimps were sticked to the ceiling, it was hard to rescue them.
- In the giant warehouse, it was hard at first to steer the blimps using game controllers since it was easy to lost 3D perception in the air using only human eyes.
Some observation from the competition
Design
-
Using two motors as forward thrust will cause problems:
• Two motors are not exactly the same
• The position of the motors is not exactly symmetrical
• The control of two motors are exactly the same if we were to use analog joystick
-
Motor drivers, tb6612fng:
• Motors driver is two is going to hold that much current, and when it reached the maximum 3.7v, the two motors are just dead
• The current will drop when you activate 2 motors vs. 1 motor
-
Wiring:
• We should design our own PCBs instead of using other ready-to-go board
• We should integrate the motor driver into the design
• The wiring warp technique is not really efficient, we have to tape everything
• In a very intense competition, the wire fell off easily
• Hard to assemble
-
The speed vs. agility:
• How to quantify the speed and agility in the lab
• Which one is more important
-
Purchase
• Always have backup and extra more for things
-
Control
• The control system should be robust enough
• Easy to deploy, and it’s portable
• Easy to switch between different airships
• Easy to change the settings just from remote control code
• Easy for non-experienced user to use
-
Other design:
• The GMU team used two motors + 1 servo motor, one for vertical control, one for horizontal control, they also used one servo motor + DC motor to control the turning.
• The GMU team have used our design before, they found it was hard to control
• The GMU team also used fin to counteract the force that generated by asymmetrical thrust, which will greatly reduce the instability of blimps