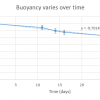
The problem of air leakage is a problem that every balloon has to face. We need to know and understand the air leakage situation of the blimp that we are going to use in the future. The following two pictures are situation of balloon in day 1 vs. day 28: I recorded some data in the past 28 day...

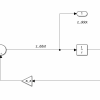
In the previous test, the result shows that the turning ability of the configuration used for the shark robot is not good. The reason is the turning torque generated by two motors located beneath the balloon is not large enough. Therefore, in this test, I put the motors on the side of the balloon...

This week I managed to integrate the system of the blimp and conducted a flying test. 1. System Overview Micro controller: NodeMCU ESP8266 board Motor driver: TB6612 Motor: 53,000 rmp motor Propeller: 65mm propeller Gondola: 3D printed Sticking method: Hook and loop tape 2. Control...
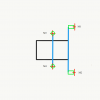
We designed a reconfigurable gondola and motor beam that could allow us to test different thrust configuration efficiently. Here are two examples: The different configuration that we would like to test: (The following figures are all top view) The research questions that we want...
During the blimp WIFI manual control experiment, I noticed some interesting phenomena. Even the following experiments are just some failure examples, I still can learn something from it. Failure experiment 1: The reason the balloon hit the wall was because human operational mistakes. When you...

This week I did an integrated test of blimp to achieve horizontal and vertical actuation. The gondola is shown as below: The vertical and horizontal actuation: Your browser does not support the video tag.Your browser does not support the video tag. Next step would be testing a whole integra...

I built a prototype version that attached motor propellers on to the clownfish balloon. This experiment is gain more intuition on making the gondola, and testing the speed of clownfish balloon that uses propellers. The experiment set up: Environment Temperature: 21°c Testing space: Length 138...
Finished the experiment of using bluetooth and wifi to remotely control two motors. Bluetooth + cellphone app: Wifi + cellphone app:
Weekly Update - As part of the FORAY team, I worked on building a mathematical model of the blimp on Simulink. I familiarized myself with dynamic equations of the motion of the blimp. Modeling - Tutorial I used to learn the fundamentals of Simulink – http://ctms.engin.umich.edu/CTMS/index.php?e...

A FORAY into Lighter Than Air Vehicles How can we create blimps that can outstrip competition in agility and speed? This was the initial question our team was posed with when embarking on this project. To solve it, we began with a "project proposal" outlining what we thought was the best method...