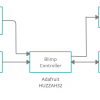
The general idea of the blimp autonomy is that the controller that we are using for the blimp will receive multiple inputs which will determine how the blimp is going to move. On a high level, the camera detect the objects like the green balloon, opponent's blimp, and the goal post. That, along with...
Dash I worked with the team of undergrads to develop this initial list of requirements for the dashboard. It's based on the kinds of experiments we plan to run and what kinds of data will be relevant. Of course, this is a preliminary list only, but I've specified that we will use modular design so...

Last weekend, I manufactured a PE balloon envelope. Here is the manufacture process: The PE balloon after inflated: The total lifting capacity is about 41 g. The total weight of the electronics of the control and sensing part is about 27g:
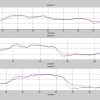
This past week, I focused on improving upon the altitude filtering algorithms I had tested previously for the blimps on FORAY. The previous two algorithms I had implemented (both in arduino and in MATLAB) were a moving average filter and an exponential filter (both first-order filters). Both intro...
Alternative Link Cut time: 8mins Folding time: 2mins Weight: 2.2g

I have spent the past weeks assembling a blimp on which to test a feedback control system to aid in controlling the blimp as well as building said control system. The picture below shows the experimental setup. So far, the blimp is assembled and controlled based on IMU motion. The video below...

This past week I have developed a framework for motor feedback control using IMU (orientation) data. I first wrote scalable motor control software for interfacing with the tb6612. A quick test operation can be seen below. Motor Test: Your browser does not support the video tag. I then integr...
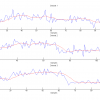
In order to improve the inertial measurement capabilities of the blimps on the Foray project, I have been working with Zhaoliang to implement various filtering algorithms for the altimeter data we collect. So far, I have used Matlab to create both an exponential filter and a moving average filter....
This week I conducted the test simulating a single blimp in the competition capturing the ball and send it to the goal. The components in the test are not exactly the same as what will be used in the competition, however, it is still a good test to show the capability of the blimp. here is the v...

Knowledge of a lighter-than-air vehicle's orientation is an essential initial step in ensuring stable operation. I have been working on implementing a sensor fusion system for the blimps on the FORAY project. The current implementation uses a 6-DOF IMU, the MPU6050. The experimental setup can be...