Here is the prelab for the competition in November. link
Alternative Link Cut time: 8mins Folding time: 2mins Weight: 2.2g

Different configuration that I have tested: 4 motors configuration 2 motors + 1 fin configuration 2 motors + 1 fin configuration What is needed for the next step: origami gondola origami motor holder 3D printed motor holder:
There are several works that somehow deal with the expensive computation time for edge evaluations in graph-search planning algorithms. Here I explain one of the state-of-art algorithms to deal with this problem, which is lazy weighted A* (LWA). LWA works as follows. First, LWA assumes that the tr...
For 3D navigation systems, representing the orientation is always annoying. After going through several painful learning and debugging processes, I share some lessons that I learned. The quaterion parameterization There are several ways to represent a 3d orientation. In real system, everyone pre...

I have spent the past weeks assembling a blimp on which to test a feedback control system to aid in controlling the blimp as well as building said control system. The picture below shows the experimental setup. So far, the blimp is assembled and controlled based on IMU motion. The video below...

Specifications of the system - Blimp with 2 motors used for horizontal propagation connected to ESP32 microcontroller (Slave Device) NodeMCU with ESP 8266 acting as the master device 2.4GHz with ESP Now protocol is used for communication between the 2 devices A joystick controller is used...

This experiment demonstrates that by using ESP Now protocol we have the capability to control multiple blimps from a single joystick controller. We can switch between different control modes at the click of a button. In the following video - 1 ESP32 microcontroller is connected to the motors. 1...

Gripper definition: G1: simple gripper, no stiffener mechanisms added (failed) G2: optimized gripper, with stiffener mechanisms added (success) G3: over-weight gripper, with heavy-stiffener mechanisms added (failed) Videos: 1.a. G1, close view, clamp on bar, close 1.b. G1, whole view (wi...
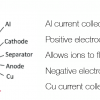
How to customize batteries according to your requirements? It is very challenging to design a battery to satisfy specific loading. For example, you may need to have a battery that can outup certain current when connected to an electric-driven actuator with a certain resistance. Similarly, for our pr...