High Level Project Goal (A review of previous post)
Following the research plan presented last week (link to previous post: https://uclalemur.com/blog/computational-design-of-foldable-robots-high-level-flow-chart), more progress has been made.
A Reminder of Previous Method
Previously, in Sept, I presented a linearization method, that works on rectangle plate, distributed load across the plates with simply-supported boundary conditions on all four edges.
Link to previous post: https://uclalemur.com/blog/de-linearization-of-plate-theory
However, this method only works with that specific case, it does not apply to arbitrary shapes, with arbritary boundary conditions and arbitrary loading conditions.
Therefore, we need to generalize the linearization method to make our approach be applied to arbitrary shapes, with arbritary boundary conditions and arbitrary loading conditions.
Weekly Progress
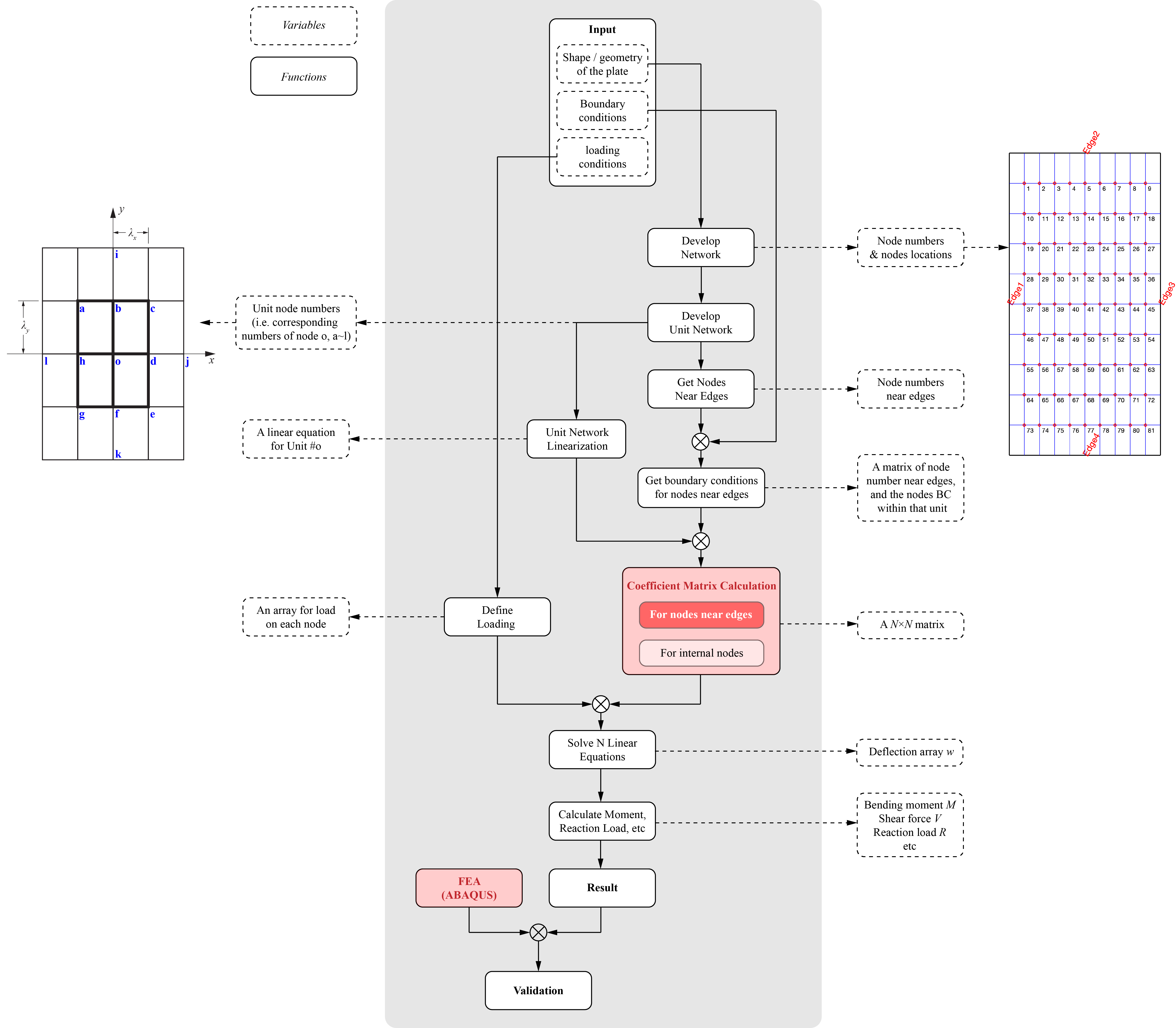
- {DONE} Entire design framework. Now we only need to insert design cirteria into FUNCTION Coefficient Matrix Calculation.
- {In Progress} Coefficient calculation is in progress. Only simply-supported boundary condition has been implemented.
- {Nice to have ASAP} FEA tool (ABAQUS). I will need this FEA tool to validate my results once arbitaray shape / boundary condition / loading are applied. So better get the tool ready ASAP, if possible.
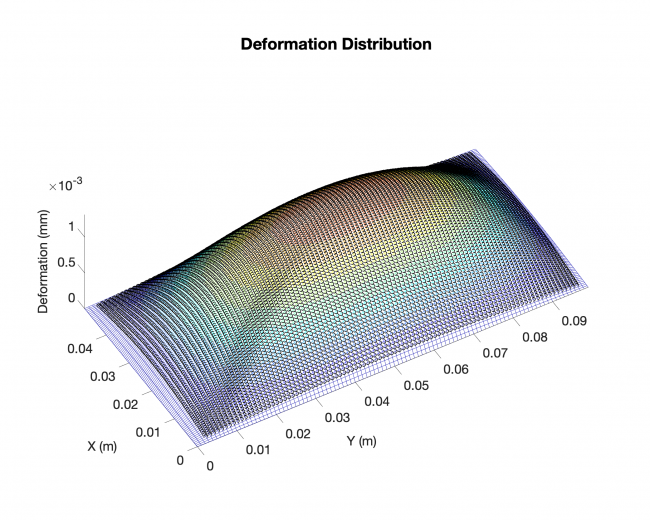
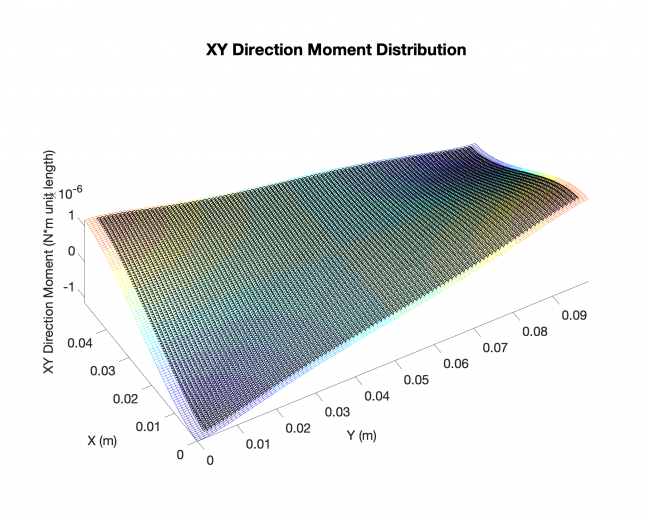
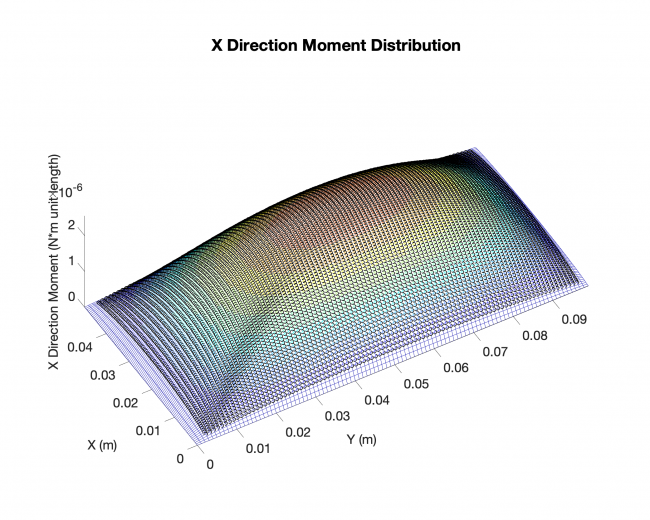
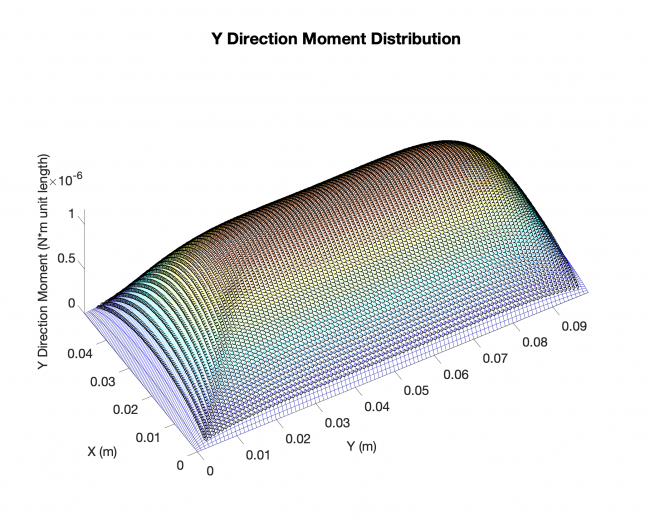
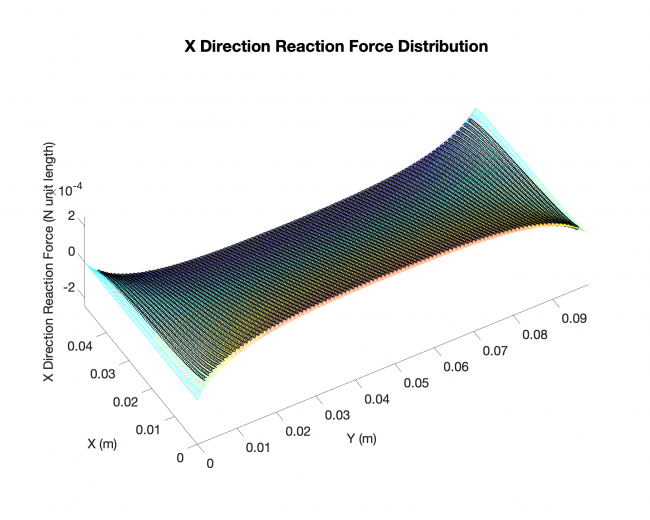
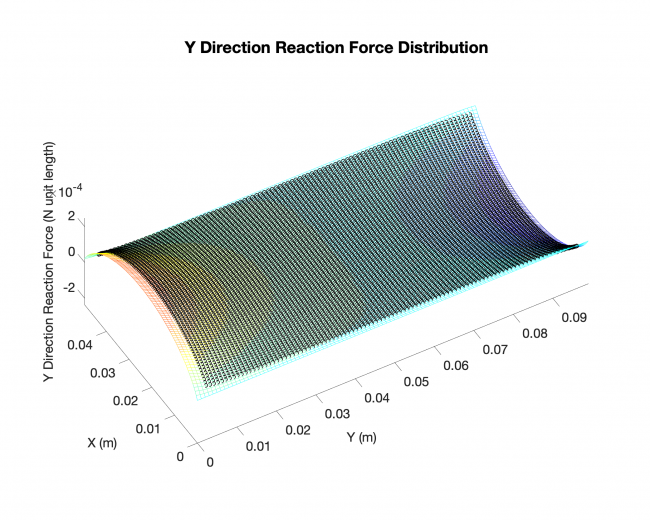
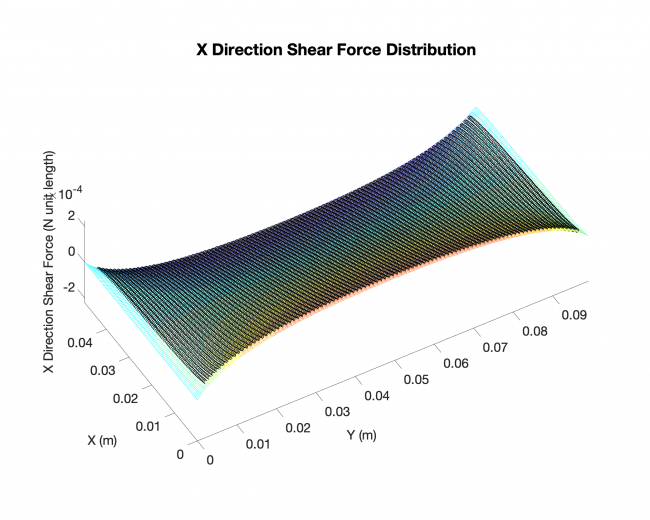
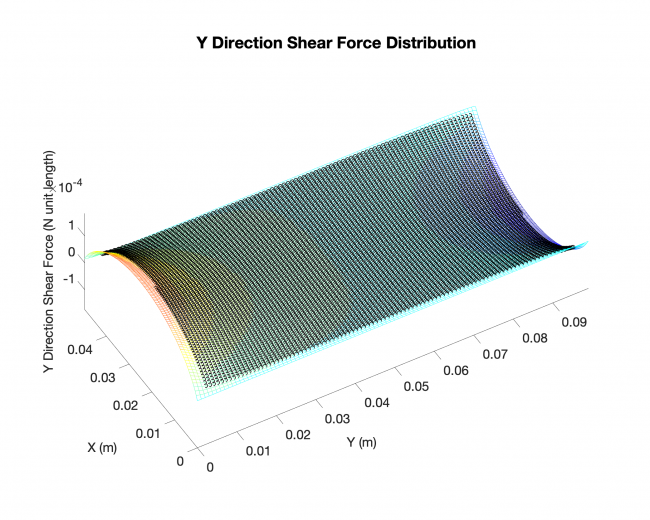
Results (Rectangle plate, distributed load across the plates with simply-supported boundary conditions on all four edges)
Plates & conditions: rectangle plate, distributed load across the plates with simply-supported boundary conditions on all four edges
Comparison: results from our approach V.S. existing analytical solutions
Results:
Meshing: analytical solution
Black dots: results from our approach
Weekly Plan
-
Get ABAQUS ready (on server??)
-
Implement free edge boundary condition and clamped boundary condition into our approach (For rectangles, for now).
-
Get familiar with ABAQUS.