17
Oct
FORAY - Ball Detection on ESP 32 Cam and Transfer Back to ESP 32 Board
Zhiying Li (Steven) forayWe are able to conduct green ball detection end-to-end pipeline using ESP 32 Cam
The closed-loop communication figure:
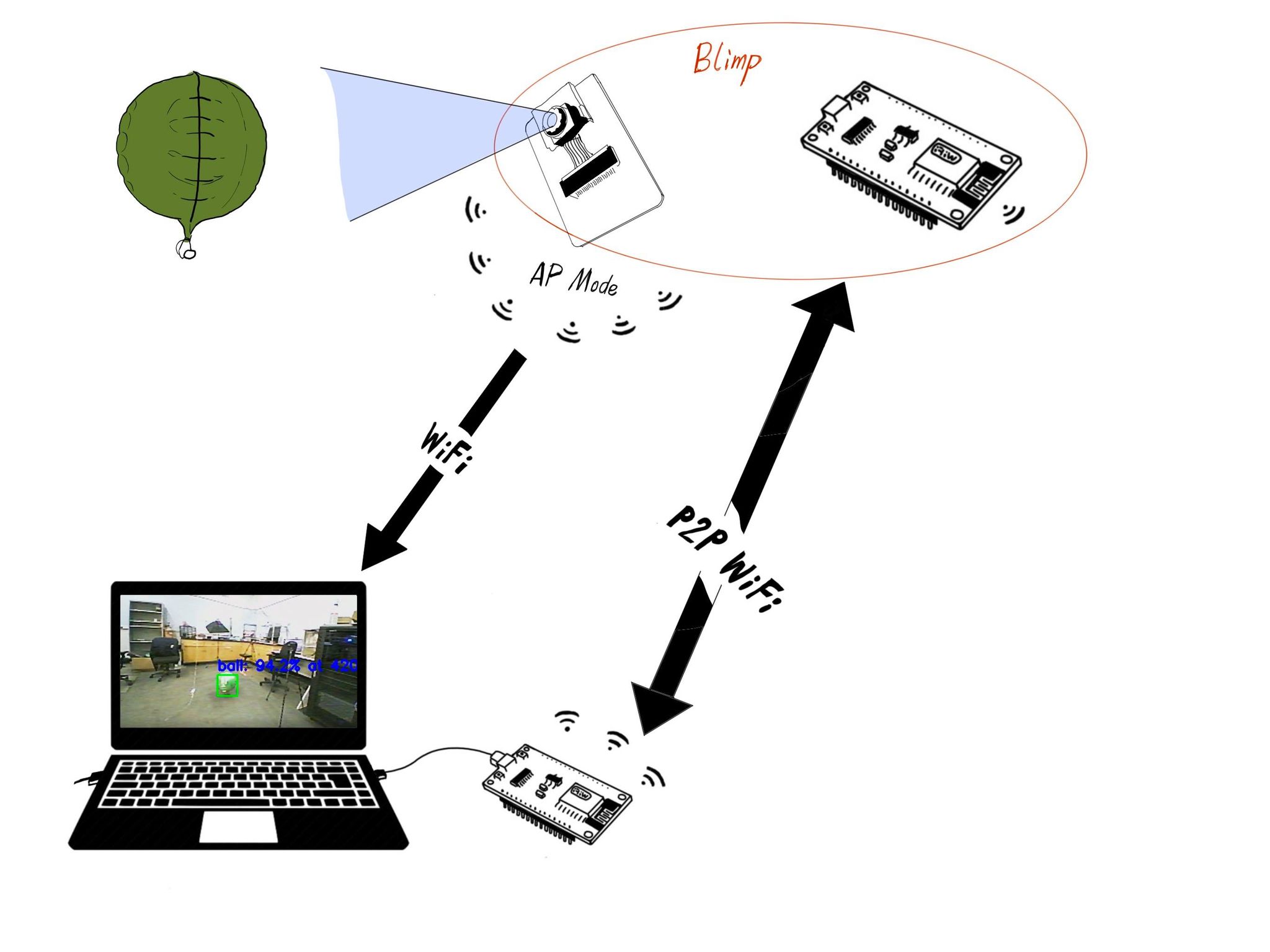
We are now able to transfer detected data (X,Y) position of the center of the green ball) to Esp32 feather board
- ESP 32 Camera (as an Access Point) broadcast video it saw
- PC Receive it under ESP32CAM HotSpot
- On PC (with CUDA) using Python Process It locally
- If detected, feed the ( x, y ) data out of a serial port, which connects to a ESP 32 board (Master - Transmitter ); Otherwise, Feed (-1, -1)
- ESP 32 board (Slave - Receiver) is able to receive the information
- Whether we have detected ball or not
- If detected, what is the (x,y) position of the ball.
Note:
- This setup does not require WiFi connection. The ESP32 broadcast its own hotspot, and ESP 32 Tx and Rx are peer-to-peer connections.
- The ML code, written by Aaron is very robust. It can detect the balls with very great confidence.
Next:
- More information can be sent other than (x,y). Also area, and distance.
- Put it onto the blimp system