This last week I worked on improving the android app. The layout that I am planning to implement currently has 4 pages. The first page would be the main menu where the user can choose to connect to the NodeMCU microcontroller either through serial USB or wirelessly using Wi-Fi. If Serial is chosen then the app would wait for the user to connect the microcontroller and then wait for input from the microcontroller containing information on what sensors and modules need to be activated in the app. Once this is complete then the app would open another page containing the user interface for the active modules. If Wireless connectivity is selected then it would prompt the user to connect to the hotspot generated by the microcontroller and transfer them to a browser page.
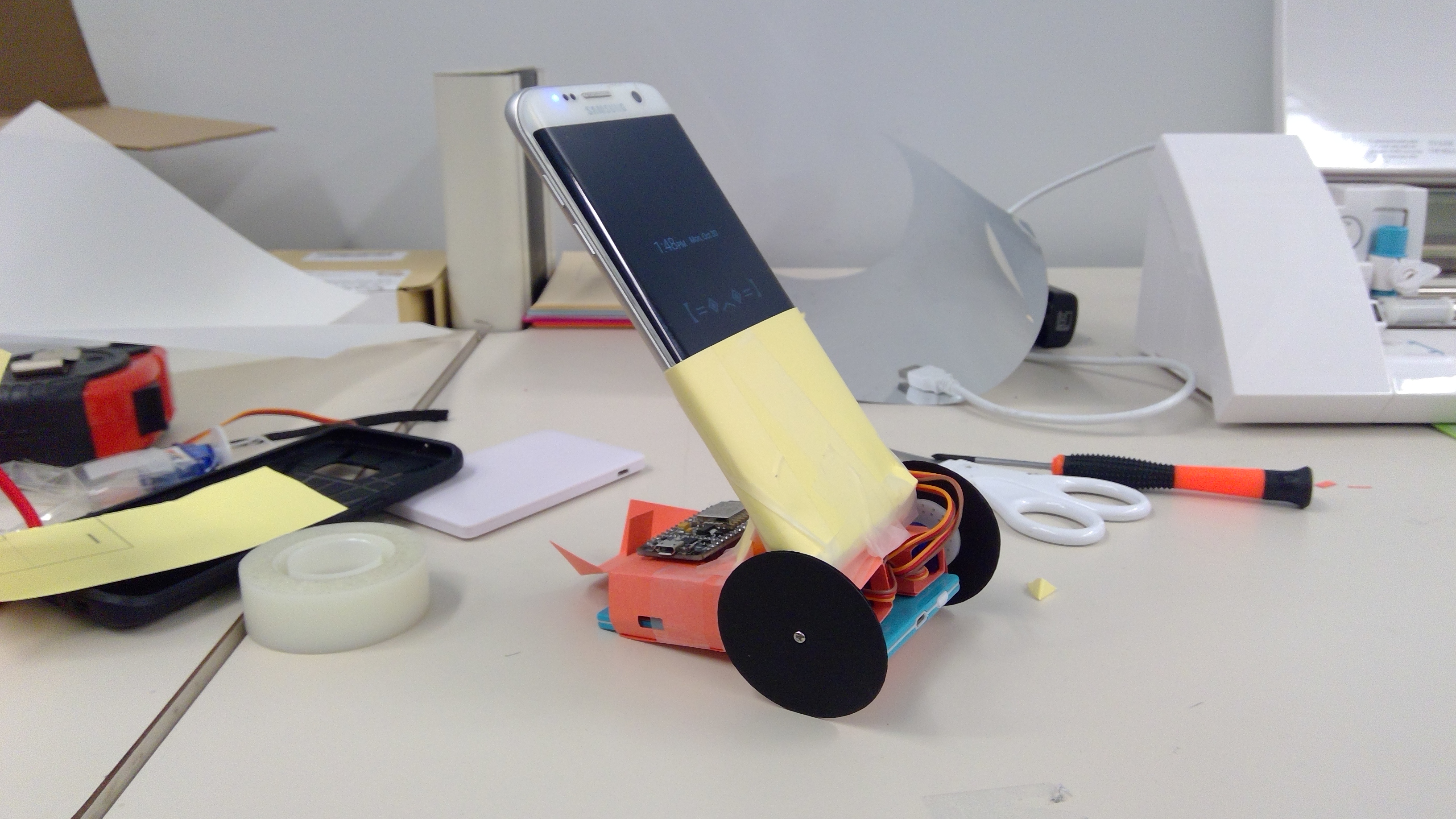
I also worked on finding a suitable position for the phone on the two wheeled bot. As it is right now the weight of my phone is too big for a two wheeled bot to work optimally. As a possible solution I will be looking into creating a four wheeled bot so for the next couple of weeks I will be working to create a cutout for the new robot.