There are two things I would like to demonstrate:
-
We can rapidly complete iterative design, for a device that failed initially.
-
We can predict failure ahead of time.
There are more things I would like to show:
-
A. Our design tool can be used on different materials
-
Isotropic material, such as plastic and glass
-
Anisotropic material, such as plywood (orthotropic)
B. Our design tool can be used on different complex boundary conditions, different loading modes
C. There are different failures
-
Too much stress causing material to fail (break)
-
Too much deflection causing system to malfunction / not pass industrial standard.
D. Our design tool is suitable for different objects/applications
e.g. Origami 'toy' & furniture
Demo
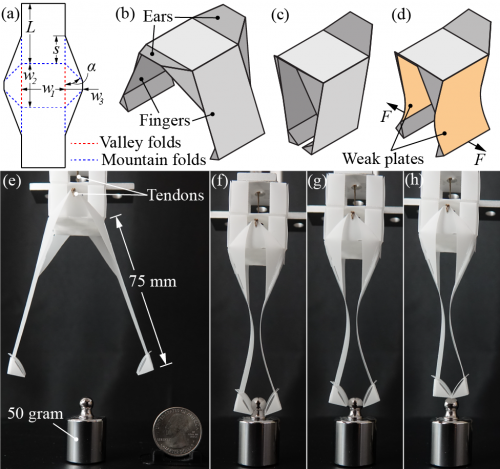
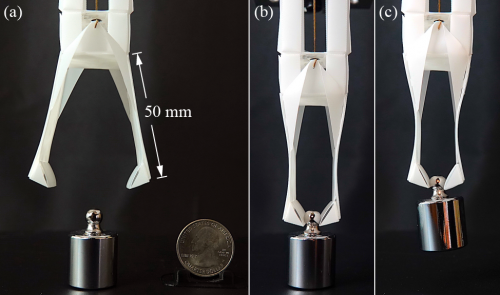
1. Origami gripper, isotropic material C-F-F-F-C-C, too much deflection, rapid iterative design
I am still thinking about how to improve this last graph.
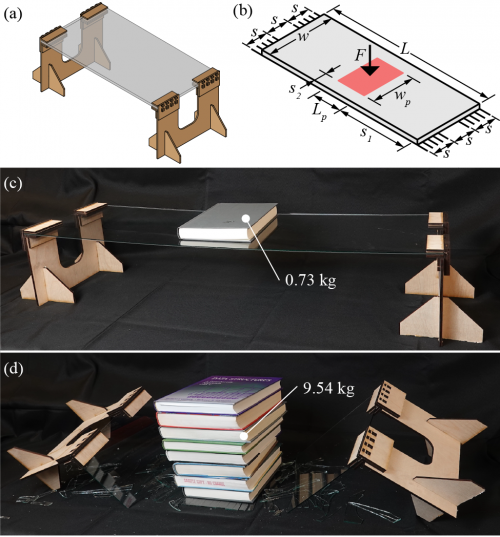
2. Furniture glass table, isotropic material, C-F-C-F-C-F-C-F, too much stress causing break, predict ahead of time
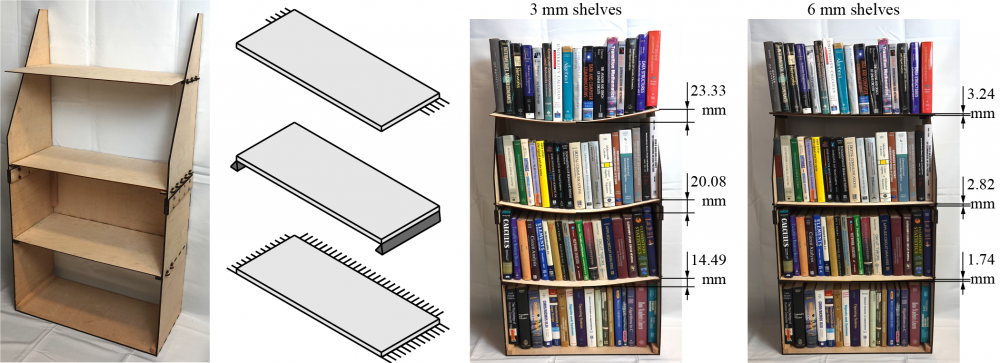
3. Furniture bookshelf, anisotropic material (plywood), 3 different BCs (C-C-C-F, S-F-S-F, C-F-C-F-F-F), predict ahead of time
-
Using 3 mm thick plywood as shelf: (1) too much deflection, surpass industry standard (max deflection = L/144 = 4mm) //C-C-C-F//; (2) Too heavy, can not hold weight, shelf slide, malfunction //S-F-S-F//
-
Using 6 mm thick plywood as shelf: all good