27
Feb
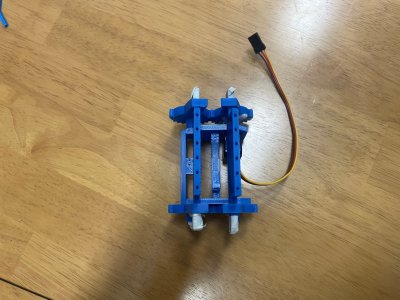
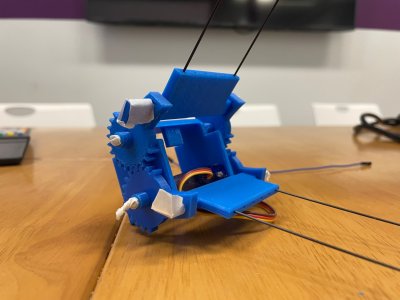
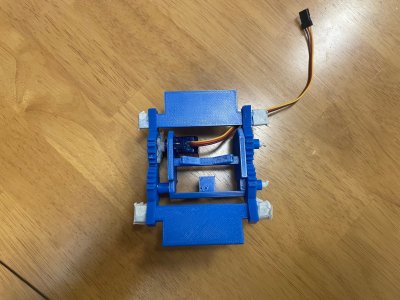
FORAY - First active capturing mechanism prototype
Che Jin Goh (CJ) #activecapturingmechanism #clawThis was the first attempt at making an active capturing mechanism for the autonomous blimp. We tried using a claw design where the carbon fiber rods acted as claws while a servo motor along with gears assisted in rotary motion of the claw.