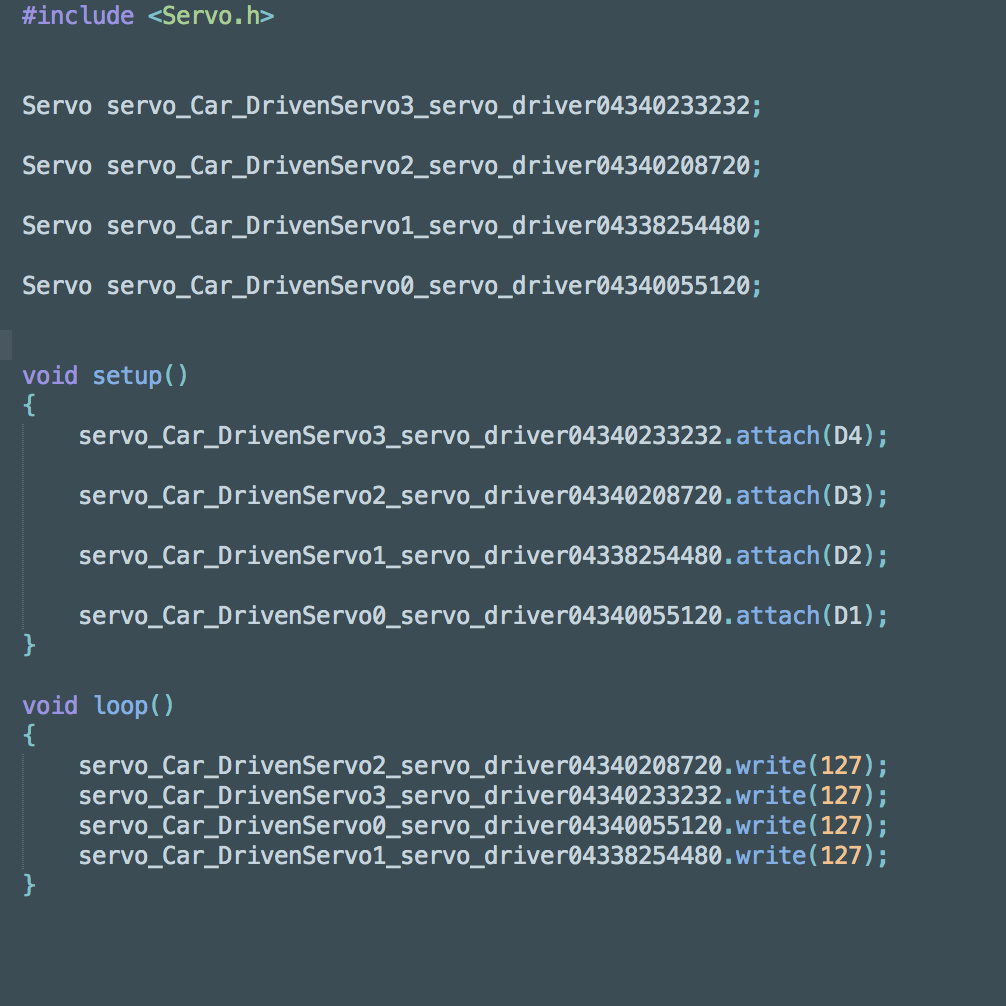
RoCo's graphical interface can now be used to drive the four wheeled car created by Jack. In order to do this, the user must drag a NodeMCU, 4 Driven Servos, and 4 Constant Blocks into the workspace, and click export to generate a builder file. Then, you plug in the PWM pins into the Driven Servos and set the parameters of the constants which dictate the speed at which the servos turn, and the car is good to go!